目标检测算法图解:一文看懂RCNN系列算法
Posted
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了目标检测算法图解:一文看懂RCNN系列算法相关的知识,希望对你有一定的参考价值。
参考技术A 姓名:王咫毅学号:19021211150
【嵌牛导读】CNN如此风靡,其衍生算法也是层出不穷,各种衍生算法也可以应用于各种应用场景,各类场合。本文则是了解每个衍生算法的各个使用场景、原理及方法。
【嵌牛鼻子】RCNN 目标检测
【嵌牛提问】RCNN系列算法有何区别和联系?
【嵌牛正文】
在生活中,经常会遇到这样的一种情况,上班要出门的时候,突然找不到一件东西了,比如钥匙、手机或者手表等。这个时候一般在房间翻一遍各个角落来寻找不见的物品,最后突然一拍大脑,想到在某一个地方,在整个过程中有时候是很着急的,并且越着急越找不到,真是令人沮丧。但是,如果一个简单的计算机算法可以在几毫秒内就找到你要找的物品,你的感受如何?是不是很惊奇!这就是对象检测算法(object detection)的力量。虽然上述举的生活例子只是一个很简单的例子,但对象检测的应用范围很广,跨越多个不同的行业,从全天候监控到智能城市的实时车辆检qian测等。简而言之,物体检测是强大的深度学习算法中的一个分支。
在本文中,我们将深入探讨可以用于对象检测的各种算法。首先从属于RCNN系列算法开始,即RCNN、 Fast RCNN和 Faster RCNN。在之后的文章中,将介绍更多高级算法,如YOLO、SSD等。
1.解决对象检测任务的简单方法(使用深度学习)
下图说明了对象检测算法是如何工作。图像中的每个对象,从人到风筝都以一定的精度进行了定位和识别。
下面从最简单的深度学习方法开始,一种广泛用于检测图像中的方法——卷积神经网络(CNN)。如果读者对CNN算法有点生疏,建议 阅读此文 。
这里仅简要总结一下CNN的内部运作方式:
首先将图像作为输入传递到网络,然后通过各种卷积和池化层处理,最后以对象类别的形式获得输出。
对于每个输入图像,会得到一个相应的类别作为输出。因此可以使用这种技术来检测图像中的各种对象。
1.首先,将图像作为输入;
2.然后,将图像分成不同的区域;
3.然后,将每个区域视为单独的图像;
4.将所有这些区域传递给CNN并将它们分类为各种类别;
5.一旦将每个区域划分为相应的类后,就可以组合所有这些区域来获取具有检测到的对象的原始图像:
使用这种方法会面临的问题在于,图像中的对象可以具有不同的宽高比和空间位置。例如,在某些情况下,对象可能覆盖了大部分图像,而在其他情况下,对象可能只覆盖图像的一小部分,并且对象的形状也可能不同。
基于此,需要划分大量的区域,这会花费大量的计算时间。因此,为了解决这个问题并减少区域数量,可以使用基于区域的CNN,它使用提议方法选择区域。
2.基于区域的卷积神经网络
2.1 RCNN的思想
RCNN算法不是在大量区域上工作,而是在图像中提出了一堆方框,并检查这些方框中是否包含任何对象。RCNN 使用选择性搜索从图像中提取这些框。
下面介绍选择性搜索以及它如何识别不同的区域。基本上四个区域形成一个对象:不同的比例、颜色、纹理和形状。选择性搜索在图像中识别这些模式,并基于此提出各种区域。以下是选择性搜索如何工作的简要概述:
首先, 将图像作为输入:
然后,它生成初始子分段,以便获得多个区域:
之后,该技术组合相似区域以形成更大的区域(基于颜色相似性、纹理相似性、尺寸相似性和形状兼容性):
最后,这些区域产生最终的对象位置(感兴趣的区域);
下面是RCNN检测对象所遵循的步骤的简要总结:
1.首先采用预先训练的卷积神经网络;
2.重新训练该模型模型——根据需要检测的类别数量来训练网络的最后一层(迁移学习);
3.第三步是获取每个图像的感兴趣区域。然后,对这些区域调整尺寸,以便其可以匹配CNN输入大小;
4.获取区域后,使用SVM算法对对象和背景进行分类。对于每个类,都训练一个二分类SVM;
最后,训练线性回归模型,为图像中每个识别出的对象生成更严格的边界框;
[对上述步骤进行图解分析]( http://www.robots.ox.ac.uk/~tvg/publications/talks/Fast-rcnn-slides.pdf ):
首先,将图像作为输入:
然后,使用一些提议方法获得感兴趣区域(ROI)(例如,选择性搜索):
之后,对所有这些区域调整尺寸,并将每个区域传递给卷积神经网络:
然后,CNN为每个区域提取特征,SVM用于将这些区域划分为不同的类别:
最后,边界框回归(Bbox reg)用于预测每个已识别区域的边界框:
以上就是RCNN检测物体的全部流程。
2.2 RCNN的问题
从上节内容可以了解到RCNN是如何进行对象检测的,但这种技术有其自身的局限性。以下原因使得训练RCNN模型既昂贵又缓慢:
基于选择性搜索算法为每个图像提取2,000个候选区域;
使用CNN为每个图像区域提取特征;
RCNN整个物体检测过程用到三种模型:
CNN模型用于特征提取;
线性svm分类器用于识别对象的的类别;
回归模型用于收紧边界框;
这些过程相结合使得RCNN非常慢,对每个新图像进行预测需要大约40-50秒,这实际上使得模型在面对巨大的数据集时变得复杂且几乎不可能应用。
好消息是存在另一种物体检测技术,它解决了RCNN中大部分问题。
3.了解Fast RCNN
3.1Fast RCNN的思想
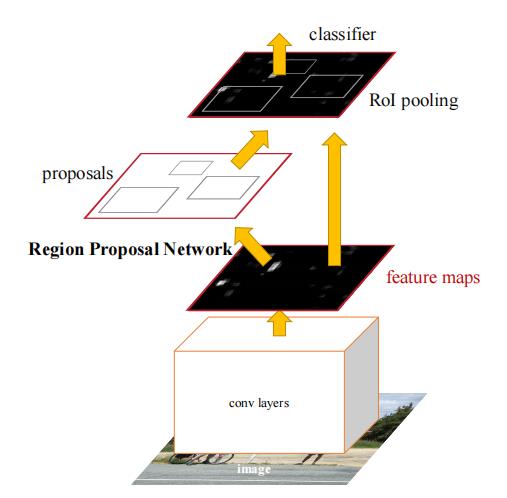
RCNN的提出者Ross Girshick提出了这样的想法,即每个图像只运行一次CNN,然后找到一种在2,000个区域内共享该计算的方法。在Fast RCNN中,将输入图像馈送到CNN,CNN生成卷积特征映射。使用这些特征图提取候选区域。然后,使用RoI池化层将所有建议的区域重新整形为固定大小,以便将其馈送到全连接网络中。
下面将其分解为简化概念的步骤:
1.首先将图像作为输入;
2.将图像传递给卷积神经网络,生成感兴趣的区域;
3.在所有的感兴趣的区域上应用RoI池化层,并调整区域的尺寸。然后,每个区域被传递到全连接层的网络中;
4.softmax层用于全连接网以输出类别。与softmax层一起,也并行使用线性回归层,以输出预测类的边界框坐标。
因此,Fast RCNN算法中没有使用三个不同的模型,而使用单个模型从区域中提取特征,将它们分成不同的类,并同时返回所标识类的边界框。
对上述过程进行可视化讲解:
将图像作为输入:
将图像传递给卷积神经网络t,后者相应地返回感兴趣的区域:
然后,在提取的感兴趣区域上应用RoI池层,以确保所有区域具有相同的大小:
最后,这些区域被传递到一个全连接网络,对其进行分类,并同时使用softmax和线性回归层返回边界框:
上述过程说明了Fast RCNN是如何解决RCNN的两个主要问题,即将每个图像中的1个而不是2,000个区域传递给卷积神经网络,并使用一个模型来实现提取特征、分类和生成边界框。
3.2Fast RCNN的问题
Fast RCNN也存在一定的问题,它仍然使用选择性搜索作为查找感兴趣区域的提议方法,这是一个缓慢且耗时的过程,每个图像检测对象大约需要2秒钟。
因此,又开发了另一种物体检测算法——Faster RCNN。
4.了解Faster RCNN
4.1. Faster RCNN的思想
Faster RCNN是Fast RCNN的修改版本,二者之间的主要区别在于,Fast RCNN使用选择性搜索来生成感兴趣区域,而Faster RCNN使用“区域提议网络”,即RPN。RPN将图像特征映射作为输入,并生成一组提议对象,每个对象提议都以对象分数作为输出。
以下步骤通常采用Faster RCNN方法:
1.将图像作为输入并将其传递给卷积神经网络,后者返回该图像的特征图;
2.在这些特征图上应用RPN,返回提议对象及其分数;
3.在这些提议对象上应用RoI池层,以将所有提案降低到相同的大小;
4.最后,将提议传递到全连接层,该层在其顶部具有softmax层和线性回归层,以对对象的边界框进行分类和输出;
这里简要解释一下RPN是如何运作的:
首先,Faster RCNN从CNN获取特征图并将它们传递到区域提议网络。RPN在这些特征图上使用滑动窗口,每个窗口生成不同形状和大小的k个方框( Anchor boxe):
方框是固定尺寸的边界箱,具有不同的形状和尺寸。对于每个方框,RPN预测两件事:
预测锚是对象的概率;
用于边界框回归器调整锚点以更好地适合物体的形状;
在有了不同形状和大小的边界框后,将其传递到RoI池层。对每个提案并对其进行裁剪,以便每个提案都包含一个对象。这就是RoI池层所做的事情,它为每个方框提取固定大小的特征图:
然后将这些特征图传递到全连接层,该层具有softmax和线性回归层,最终对对象进行分类并预测已识别对象的边界框。
4.2Faster RCNN的问题
上述讨论过的所有对象检测算法都使用区域来识别对象,且网络不会一次查看完整图像,而是按顺序关注图像的某些部分,这样会带来两个复杂性的问题:
该算法需要多次通过单个图像来提取到所有对象;
由于不是端到端的算法,不同的系统一个接一个地工作,整体系统的性能进一步取决于先前系统的表现效果。
链接: https://www.jianshu.com/p/51fc039ae7a4
菜品识别系统(Faster-RCNN目标检测算法)
一、Faster-RCNN目标检测算法的介绍
Faster-RCNN 算法由于其较高的检测准确率成为主流的目标检测算法之一,相比较 YOLO系列算法,Faster-RCNN 速度方面略显不足,平均检测精度(mAP)很高,它将 region proposal提取和 Fast-RCNN 部分融合进了一个网络模型 (区域生成网络 RPN 层)。
算法大概可以分为特征提取层,区域建议层(RPN),ROIpooling(池化)层,分类与回归四个部分。具体执行步骤如下:
(1)首先利用特征提取网络对输入进行特征提取:特征提取网络通常由卷积层、池化层,激活层组成,可以使用训练好的网络,有不同的网络架构如(VGG、Resnet、Inception)等。
(2)将产生的 feature map传入 RPN网络产生建议框,然后进行是否含有目标的二分类,同时 feature map 传入 ROIpooling 层进行池化操作,产生固定大小的候选区域特征图。
(3)对产生的候选区域特征图进行分类和回归,得到物体种类和位置。
Faster-RCNN 相较以往算法有几点重大改进:其核心是提出了 RPN(Region Proposal Network)网络,它的出现代替了传统产生候选区域的方法,实现了端到端的训练,并且将整个物体检测的流程统一到同一个神经网络中去,使得 RPN 和 Fast RCNN 实现了共享卷积特征,减少了训练时间;采用 ROI Pooling 使用最大值池化将特征图上 ROI 固定为特定大小的特征图;采用 NMS(非极大值抑制,Non-maximum suppression)技术,筛选候选框数量。
Faster-RCNN目标检测算法执行思路可参考以下这篇文章:
https://blog.csdn.net/ELSA001/article/details/119983070?spm=1001.2014.3001.5501
二、效果展示
由于数据集过少(每一类只有120张图片)加上训练只有90代,因此预测精度不高。



三、环境配置
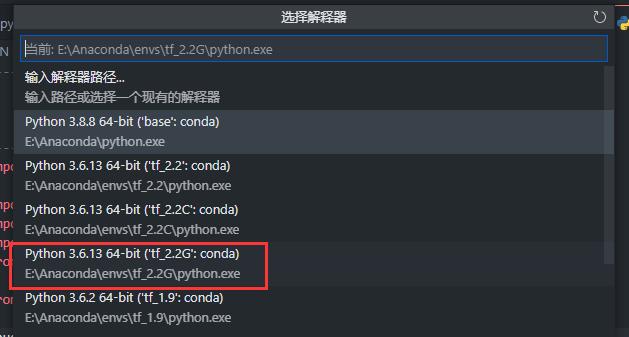
Anaconda:4.10.3
Python:3.6.13
tensorflow-gpu:2.2.0
四、图片数据集准备
Faster-RCNN目标检测算法的图片数据集采用VOC格式进行训练,使用labelimg制作VOC格式数据集使用方法可以参考以下文章:
https://blog.csdn.net/ELSA001/article/details/119987024?spm=1001.2014.3001.5501
也可以参考以下教学视频:
https://www.bilibili.com/video/BV1kV411k7D8
https://www.bilibili.com/video/BV1db411U7BB
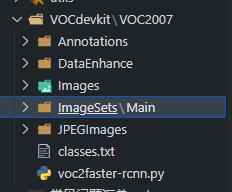
图片打完标签之后,即可运行voc2faster-rcnn.py文件来生成这些训练相关的txt文件:

voc2faster-rcnn.py
#----------------------------------------------------------------------#
# 验证集的划分在train.py代码里面进行
# test.txt和val.txt里面没有内容是正常的。训练不会使用到。
#----------------------------------------------------------------------#
'''
#--------------------------------注意----------------------------------#
如果在pycharm中运行时提示:
FileNotFoundError: [WinError 3] 系统找不到指定的路径。: './VOCdevkit/VOC2007/Annotations'
这是pycharm运行目录的问题,最简单的方法是将该文件复制到根目录后运行。
可以查询一下相对目录和根目录的概念。在VSCODE中没有这个问题。
#--------------------------------注意----------------------------------#
'''
import os
import random
random.seed(0)
xmlfilepath=r'E:\\python-run-env\\Faster-RCNN\\VOCdevkit\\VOC2007\\Annotations'
saveBasePath=r"E:\\python-run-env\\Faster-RCNN\\VOCdevkit\\VOC2007\\ImageSets\\Main"
#----------------------------------------------------------------------#
# 想要增加测试集修改trainval_percent
# train_percent不需要修改
#----------------------------------------------------------------------#
trainval_percent=1
train_percent=1
temp_xml = os.listdir(xmlfilepath)
total_xml = []
for xml in temp_xml:
if xml.endswith(".xml"):
total_xml.append(xml)
num=len(total_xml)
list=range(num)
tv=int(num*trainval_percent)
tr=int(tv*train_percent)
trainval= random.sample(list,tv)
train=random.sample(trainval,tr)
print("train and val size",tv)
print("traub suze",tr)
ftrainval = open(os.path.join(saveBasePath,'trainval.txt'), 'w')
ftest = open(os.path.join(saveBasePath,'test.txt'), 'w')
ftrain = open(os.path.join(saveBasePath,'train.txt'), 'w')
fval = open(os.path.join(saveBasePath,'val.txt'), 'w')
for i in list:
name=total_xml[i][:-4]+'\\n'
if i in trainval:
ftrainval.write(name)
if i in train:
ftrain.write(name)
else:
fval.write(name)
else:
ftest.write(name)
ftrainval.close()
ftrain.close()
fval.close()
ftest .close()
接着运行voc_annotation.py文件来生成2007_train.txt文件:
voc_annotation.py
#---------------------------------------------#
# 运行前一定要修改classes
# 如果生成的2007_train.txt里面没有目标信息
# 那么就是因为classes没有设定正确
#---------------------------------------------#
import xml.etree.ElementTree as ET
from os import getcwd
sets=[('2007', 'train'), ('2007', 'val'), ('2007', 'test')]
#-----------------------------------------------------#
# 这里设定的classes顺序要和model_data里的txt一样
#-----------------------------------------------------#
# classes = ["aeroplane", "bicycle", "bird", "boat", "bottle", "bus", "car", "cat", "chair", "cow", "diningtable", "dog", "horse", "motorbike", "person", "pottedplant", "sheep", "sofa", "train", "tvmonitor"]
classes = ["cabbage", "carrot", "nori", "potato"]
# E:\\python-run-env\\Faster-RCNN\\VOCdevkit\\VOC2007\\ImageSets\\Main\\train.txt
def convert_annotation(year, image_id, list_file):
in_file = open('E:/python-run-env/Faster-RCNN/VOCdevkit/VOC%s/Annotations/%s.xml'%(year, image_id), encoding='utf-8')
tree=ET.parse(in_file)
root = tree.getroot()
for obj in root.iter('object'):
difficult = 0
if obj.find('difficult')!=None:
difficult = obj.find('difficult').text
cls = obj.find('name').text
if cls not in classes or int(difficult)==1:
continue
cls_id = classes.index(cls)
xmlbox = obj.find('bndbox')
b = (int(float(xmlbox.find('xmin').text)), int(float(xmlbox.find('ymin').text)), int(float(xmlbox.find('xmax').text)), int(float(xmlbox.find('ymax').text)))
list_file.write(" " + ",".join([str(a) for a in b]) + ',' + str(cls_id))
wd = getcwd()
for year, image_set in sets:
image_ids = open('E:/python-run-env/Faster-RCNN/VOCdevkit/VOC%s/ImageSets/Main/%s.txt'%(year, image_set), encoding='utf-8').read().strip().split()
list_file = open('%s_%s.txt'%(year, image_set), 'w', encoding='utf-8')
for image_id in image_ids:
list_file.write('%s/VOCdevkit/VOC%s/JPEGImages/%s.jpg'%(wd, year, image_id))
convert_annotation(year, image_id, list_file)
list_file.write('\\n')
list_file.close()
五、代码具体实现
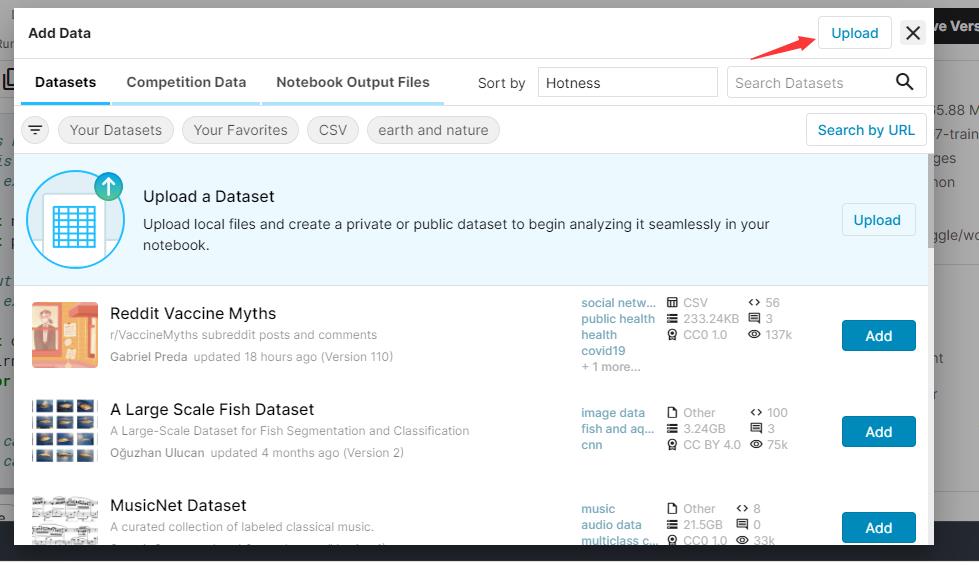
由于我的电脑显卡配置有限(但其实我的环境可以训练和预测),因此我的图片数据集都在kaggle上面训练(https://www.kaggle.com/),每周可以免费使用GPU训练42小时,预测的代码在我自己的电脑上面执行,在这篇文章里,我将会展示我在kaggle的notebook里面的训练代码。
在kaggle上面训练模型时,需要注意以下几点:
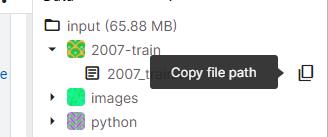
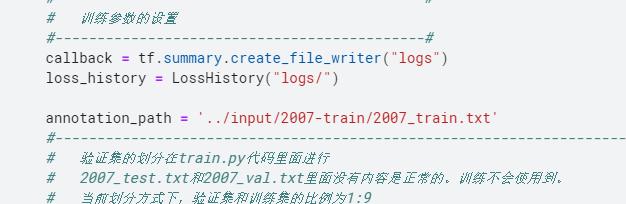
1、训练时需要在kaggle上面上传2007_train.txt和自己的图片数据,如果有预训练权重文件的话也要上传上去。


上传后在训练文件(train.py)修改自己的2007_train.txt路径:
在frcnn_training3.py文件修改自己的图片数据位置:


2、由于notebook上面无法像正常编译器一样调用其他python文件,因此在每一个notebook上面都需要添加这样的一行代码:%%writefile filename.py,然后点击运行这个notebook,训练文件的notebook才可以正常调用。
教程如下:
https://www.tqwba.com/x_d/jishu/350998.html
3、训练过程中最好把鼠标点击一个notebook里面的代码,这样系统以为你就是在编辑代码的状态,不会判定你离开,如果系统判定你离开了,训练好的模型就都没有了,必须重新开始。
(1)预测代码(自己电脑上面预测)
预测代码(predict.py):
#----------------------------------------------------#
# 对视频中的predict.py进行了修改,
# 将单张图片预测、摄像头检测和FPS测试功能
# 整合到了一个py文件中,通过指定mode进行模式的修改。
#----------------------------------------------------#
import time
import cv2
import numpy as np
import tensorflow as tf
from PIL import Image
from frcnn import FRCNN
gpus = tf.config.experimental.list_physical_devices(device_type='GPU')
for gpu in gpus:
tf.config.experimental.set_memory_growth(gpu, True)
if __name__ == "__main__":
frcnn = FRCNN()
#-------------------------------------------------------------------------#
# mode用于指定测试的模式:
# 'predict'表示单张图片预测
# 'video'表示视频检测
# 'fps'表示测试fps
#-------------------------------------------------------------------------#
mode = "predict"
#-------------------------------------------------------------------------#
# video_path用于指定视频的路径,当video_path=0时表示检测摄像头
# video_save_path表示视频保存的路径,当video_save_path=""时表示不保存
# video_fps用于保存的视频的fps
# video_path、video_save_path和video_fps仅在mode='video'时有效
# 保存视频时需要ctrl+c退出才会完成完整的保存步骤,不可直接结束程序。
#-------------------------------------------------------------------------#
# video_path = r"E:/python-run-env/Faster RCNN/img/12.mp4"
video_path = 0
video_save_path = r"C:/Users/asus/Desktop/Test/12.mp4"
video_fps = 25.0
if mode == "predict":
'''
1、该代码无法直接进行批量预测,如果想要批量预测,可以利用os.listdir()遍历文件夹,利用Image.open打开图片文件进行预测。
具体流程可以参考get_dr_txt.py,在get_dr_txt.py即实现了遍历还实现了目标信息的保存。
2、如果想要进行检测完的图片的保存,利用r_image.save("img.jpg")即可保存,直接在predict.py里进行修改即可。
3、如果想要获得预测框的坐标,可以进入frcnn.detect_image函数,在绘图部分读取top,left,bottom,right这四个值。
4、如果想要利用预测框截取下目标,可以进入frcnn.detect_image函数,在绘图部分利用获取到的top,left,bottom,right这四个值
在原图上利用矩阵的方式进行截取。
5、如果想要在预测图上写额外的字,比如检测到的特定目标的数量,可以进入frcnn.detect_image函数,在绘图部分对predicted_class进行判断,
比如判断if predicted_class == 'car': 即可判断当前目标是否为车,然后记录数量即可。利用draw.text即可写字。
'''
while True:
img = input('Input image filename:')
try:
image = Image.open(img)
except:
print('Open Error! Try again!')
continue
else:
r_image = frcnn.detect_image(image)
r_image.show()
elif mode == "video":
capture=cv2.VideoCapture(video_path)
if video_save_path!="":
fourcc = cv2.VideoWriter_fourcc(*'XVID')
size = (int(capture.get(cv2.CAP_PROP_FRAME_WIDTH)), int(capture.get(cv2.CAP_PROP_FRAME_HEIGHT)))
out = cv2.VideoWriter(video_save_path, fourcc, video_fps, size)
fps = 0.0
while(True):
t1 = time.time()
# 读取某一帧
ref,frame=capture.read()
# 格式转变,BGRtoRGB
frame = cv2.cvtColor(frame,cv2.COLOR_BGR2RGB)
# 转变成Image
frame = Image.fromarray(np.uint8(frame))
# 进行检测
frame = np.array(frcnn.detect_image(frame))
# RGBtoBGR满足opencv显示格式
frame = cv2.cvtColor(frame,cv2.COLOR_RGB2BGR)
fps = ( fps + (1./(time.time()-t1)) ) / 2
print("fps= %.2f"%(fps))
frame = cv2.putText(frame, "fps= %.2f"%(fps), (0, 40), cv2.FONT_HERSHEY_SIMPLEX, 1, (0, 255, 0), 2)
cv2.imshow("video",frame)
c= cv2.waitKey(1) & 0xff
if video_save_path!="":
out.write(frame)
if c==27:
capture.release()
break
capture.release()
out.release()
cv2.destroyAllWindows()
elif mode == "fps":
test_interval = 100
img = Image.open('img/street.jpg')
tact_time = frcnn.get_FPS(img, test_interval)
print(str(tact_time) + ' seconds, ' + str(1/tact_time) + 'FPS, @batch_size 1')
else:
raise AssertionError("Please specify the correct mode: 'predict', 'video' or 'fps'.")
frcnn.py
import colorsys
import copy
import os
import time
import numpy as np
import tensorflow as tf
from PIL import Image, ImageDraw, ImageFont
from tensorflow.keras.applications.imagenet_utils import preprocess_input
import nets.frcnn as frcnn
from nets.frcnn_training import get_new_img_size
from utils.anchors import get_anchors
from utils.config import Config
from utils.utils import BBoxUtility
#--------------------------------------------#
# 使用自己训练好的模型预测需要修改2个参数
# model_path和classes_path都需要修改!
# 如果出现shape不匹配
# 一定要注意训练时的NUM_CLASSES、
# model_path和classes_path参数的修改
#--------------------------------------------#
# E:\\python-run-env\\Faster-RCNN\\model_data\\voc_classes.txt
class FRCNN(object):
_defaults = {
# E:\\python-run-env\\Faster-RCNN\\model_data\\voc_weight.h5
"model_path" : r'E:\\python-run-env\\Faster-RCNN\\model_data\\Epoch90-Total_Loss0.5199-Val_Loss0.5419.h5',
"classes_path" : r'E:\\python-run-env\\Faster-RCNN\\model_data\\classes.txt',
"confidence" : 0.5,
"iou" : 0.3
}
@classmethod
def get_defaults(cls, n):
if n in cls._defaults:
return cls._defaults[n]
else:
return "Unrecognized attribute name '" + n + "'"
#---------------------------------------------------#
# 初始化faster RCNN
#---------------------------------------------------#
def __init__(self, **kwargs):
self.__dict__.update(self._defaults)
self.class_names = self._get_class()
self.config = Config()
self.generate()
self.bbox_util = BBoxUtility()
#---------------------------------------------------#
# 获得所有的分类
#---------------------------------------------------#
def _get_class(self):
classes_path = os.path.expanduser(self.classes_path)
with open(classes_path) as f:
class_names = f.readlines()
class_names = [c.strip() for c in class_names]
return class_names
#---------------------------------------------------#
# 获得所有的分类
#---------------------------------------------------#
def generate(self):
model_path = os.path.expanduser(self.model_path)
assert model_path.endswith('.h5'), 'Keras model or weights must be a .h5 file.'
#-------------------------------#
# 计算总的类的数量
#-------------------------------#
self.num_classes = len(self.class_names)+1
#-------------------------------#
# 载入模型与权值
#-------------------------------#
self.model_rpn, self.model_classifier = frcnn.get_predict_model(self.config, self.num_classes)
self.model_rpn.load_weights(self.model_path, by_name=True)
self.model_classifier.load_weights(self.model_path, by_name=True)
print('{} model, anchors, and classes loaded.'.format(model_path))
# 画框设置不同的颜色
hsv_tuples = [(x / len(self.class_names), 1., 1.)
for x in range(len(self.class_names))]
self.colors = list(map(lambda x: colorsys.hsv_to_rgb(*x), hsv_tuples))
self.colors = list(
map(lambda x: (int(x[0] * 255), int(x[1] * 255), int(x[2] * 255)),
self.colors))
#---------------------------------------------------#
# 用于计算共享特征层的大小
#---------------------------------------------------#
def get_img_output_length(self, width, height):
def get_output_length(input_length):
# input_length += 6
filter_sizes = [7, 3, 1, 1]
padding = [3,1,0,0]
stride = 2
for i in range(4):
# input_length = (input_length - filter_size + stride) // stride
input_length = (input_length+2*padding[i]-filter_sizes[i]) // stride Faster-RCNN目标检测算法执行思路