自动驾驶7-4 全部课程总结 恭喜您完成课程 1
Posted AI架构师易筋
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了自动驾驶7-4 全部课程总结 恭喜您完成课程 1相关的知识,希望对你有一定的参考价值。
恭喜,你已经完成了第一个 我们的自动驾驶汽车专业课程。 您在本课程中学到的概念是 所有自动驾驶架构。 让我们总结一下到目前为止您在本专业中学到的东西。
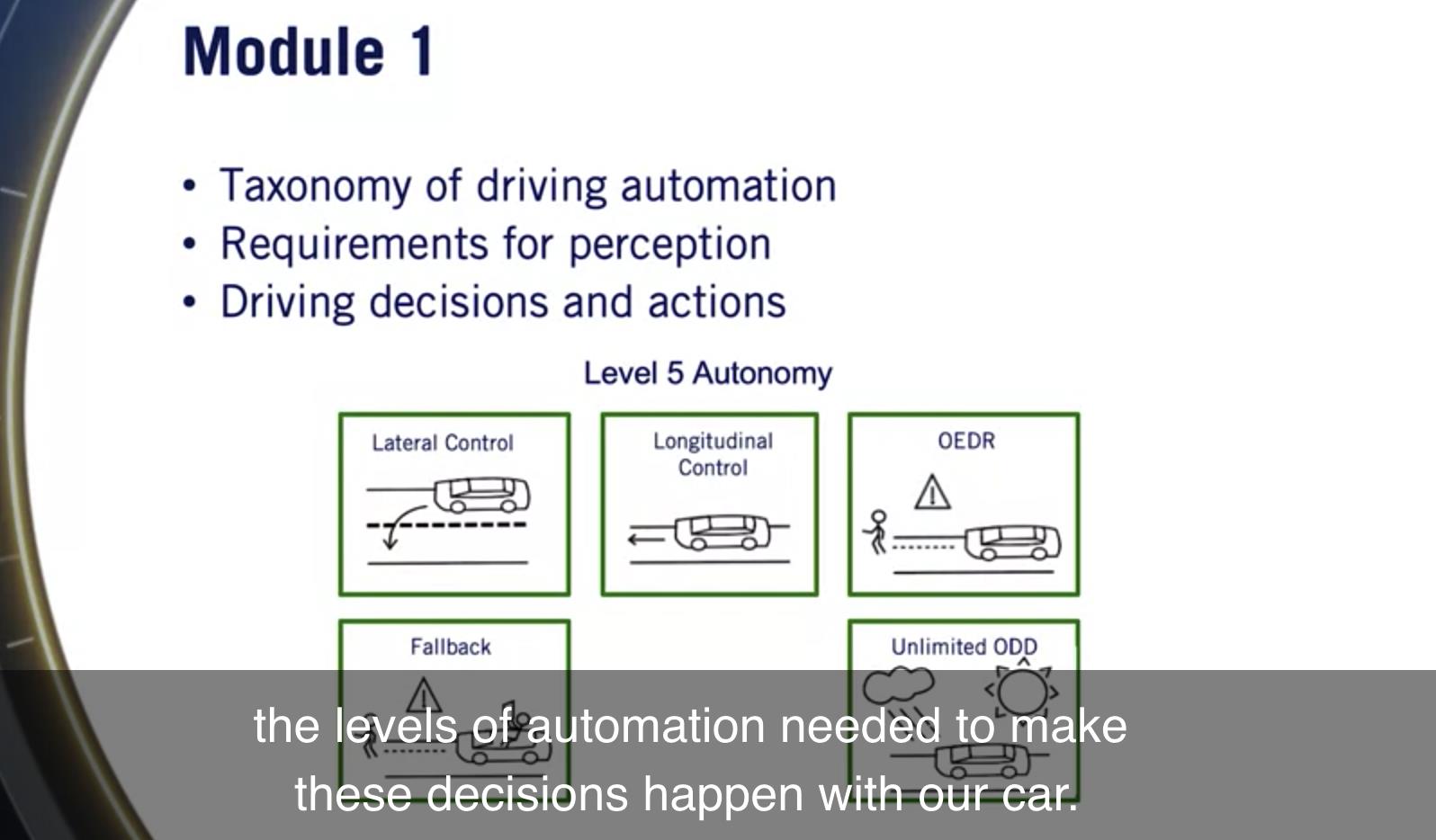
- 在课程的第一周,您了解了自动驾驶的分类 汽车以及自动驾驶的感知和规划需求。 总的来说,这给了我们一个车辆需求框架,所以 我们可以更好地了解我们需要做出哪些驱动决策,以及 在我们的汽车上做出这些决定所需的自动化水平。
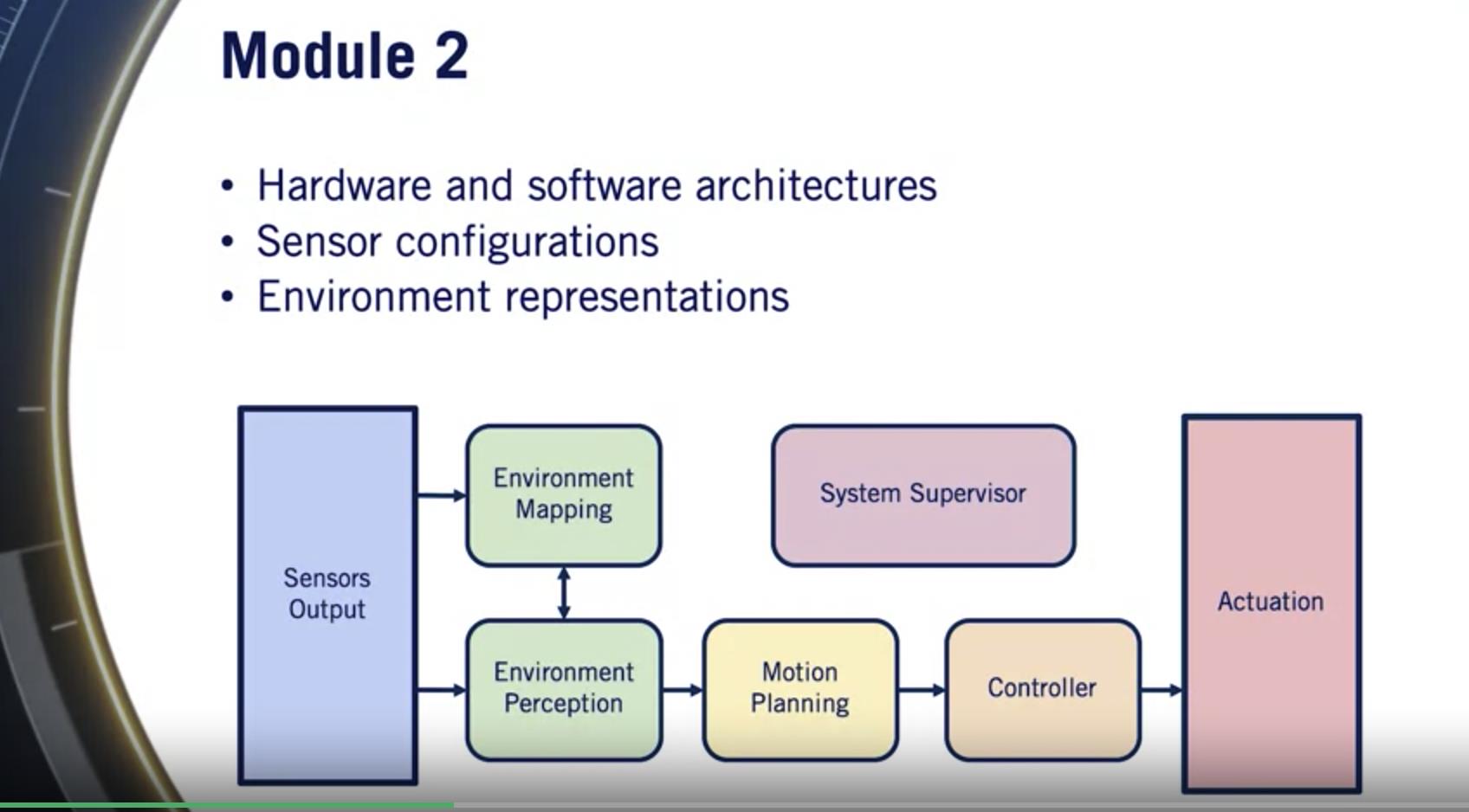
- 在第二周,您了解了硬件和软件堆栈 自动驾驶汽车。 您了解了用于 感知,设计传感器配置的基础知识,以及 典型自治软件堆栈所需的每个组件。
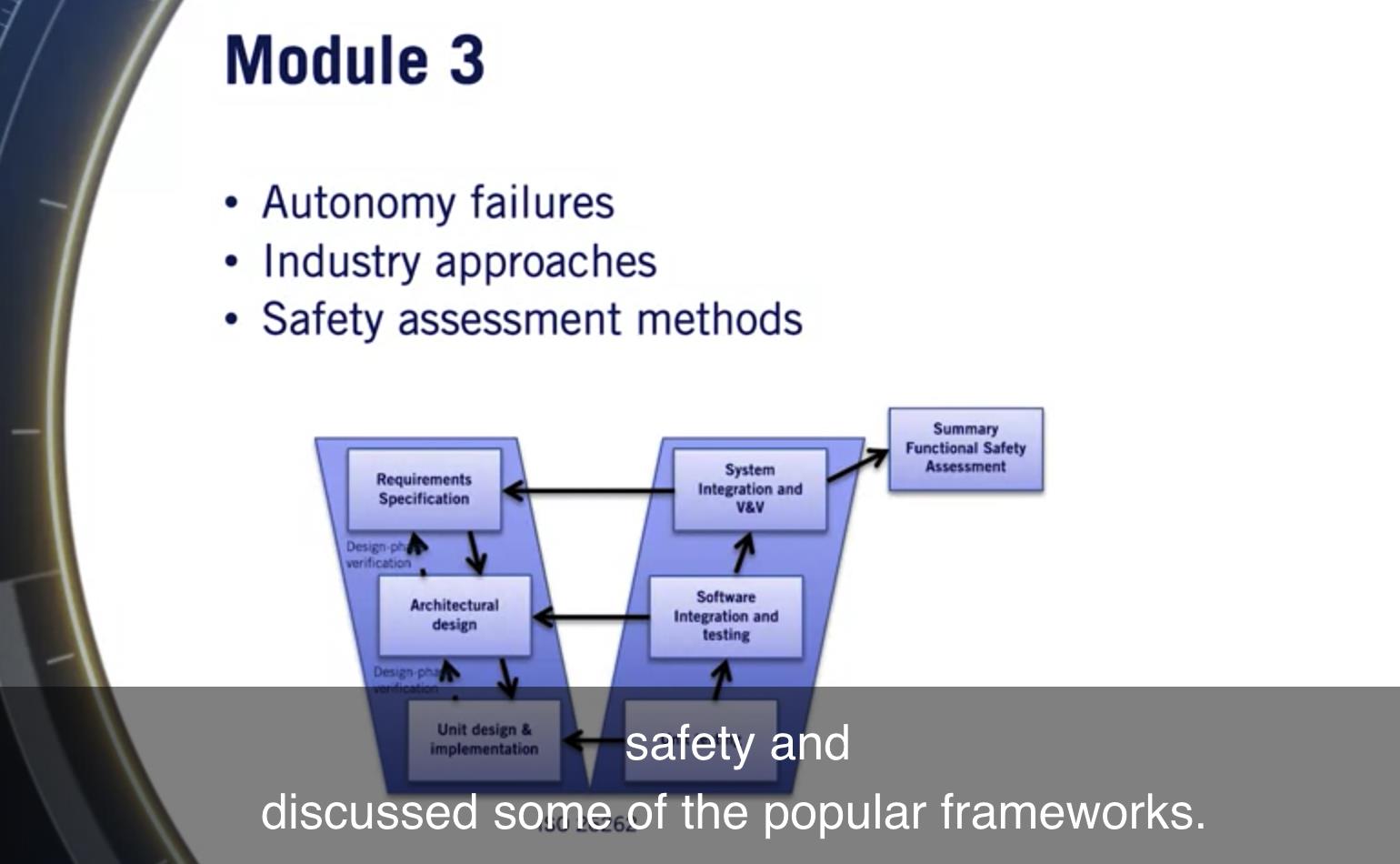
我们还探索了自动驾驶的环境表征。 但我们将在接下来的几门课程中更详细地介绍这一点。 - 在模块 3 中,您研究了安全评估的重要性 你的自动驾驶汽车。 您评估了硬件和软件堆栈的几个安全方面。 然后您探索了一些行业方法 安全并讨论了一些流行的框架。
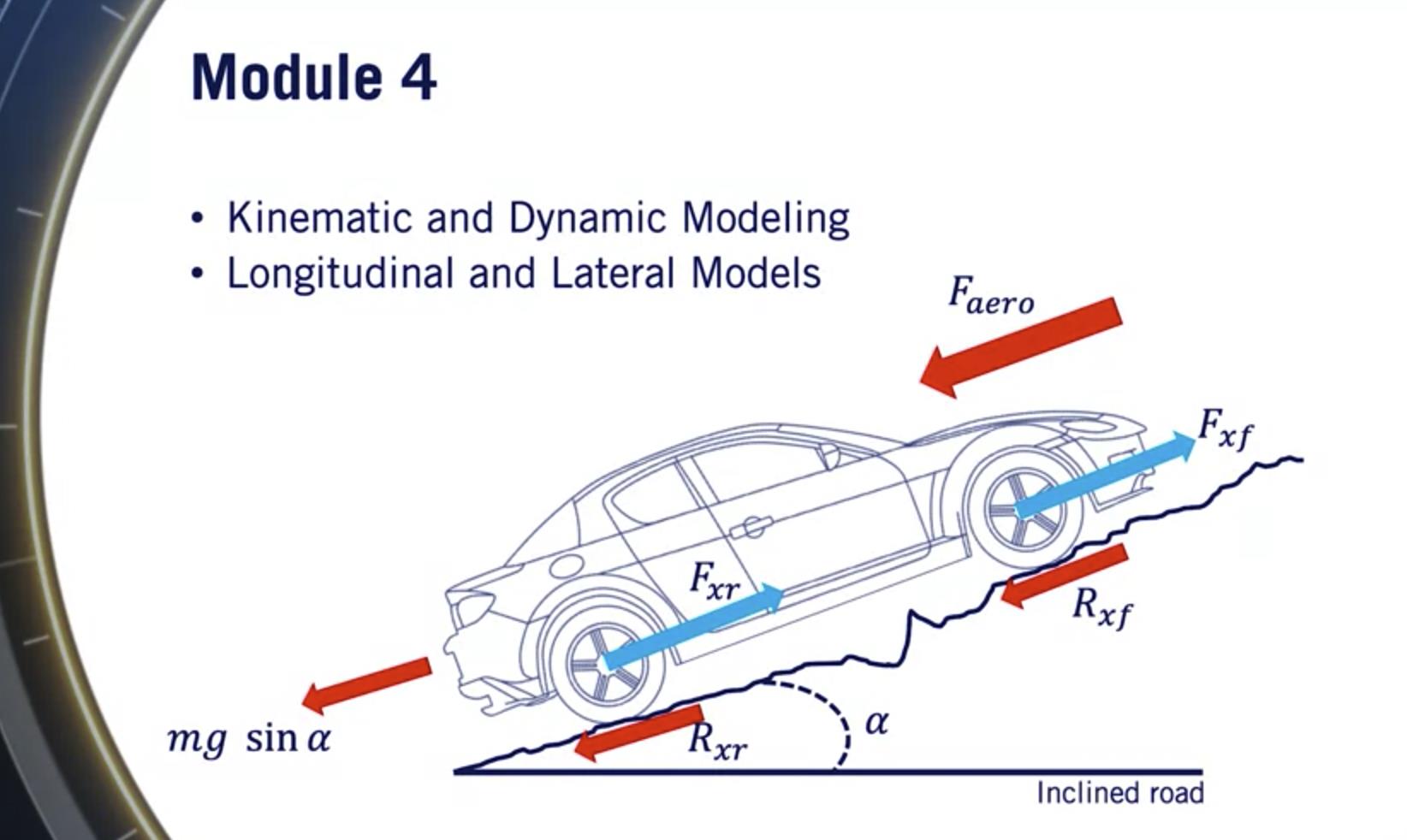
- 您了解了车辆的运动学和动力学建模。 并建立详细的纵向和横向模型来描述汽车如何 对转向、油门和制动指令做出反应。
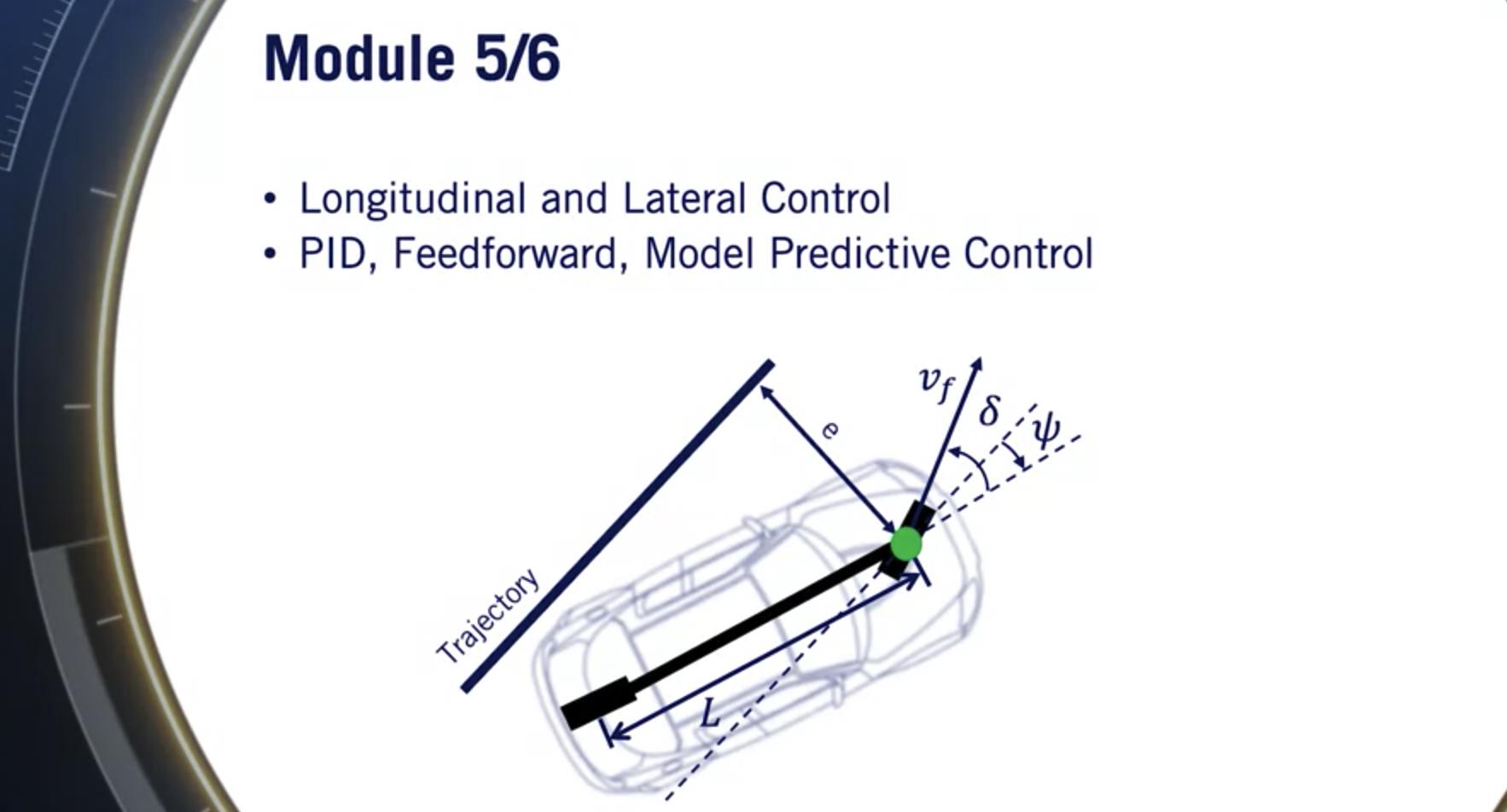
- 从那里您开发了用于纵向和 横向车辆模型。 您学习了如何定义调节车辆速度的控制器 通过一系列速度。 以及如何定义路径跟随控制器来跟踪所需的路径。 您还研究了预测轨迹控制器 安全有效地执行具有挑战性的动作。
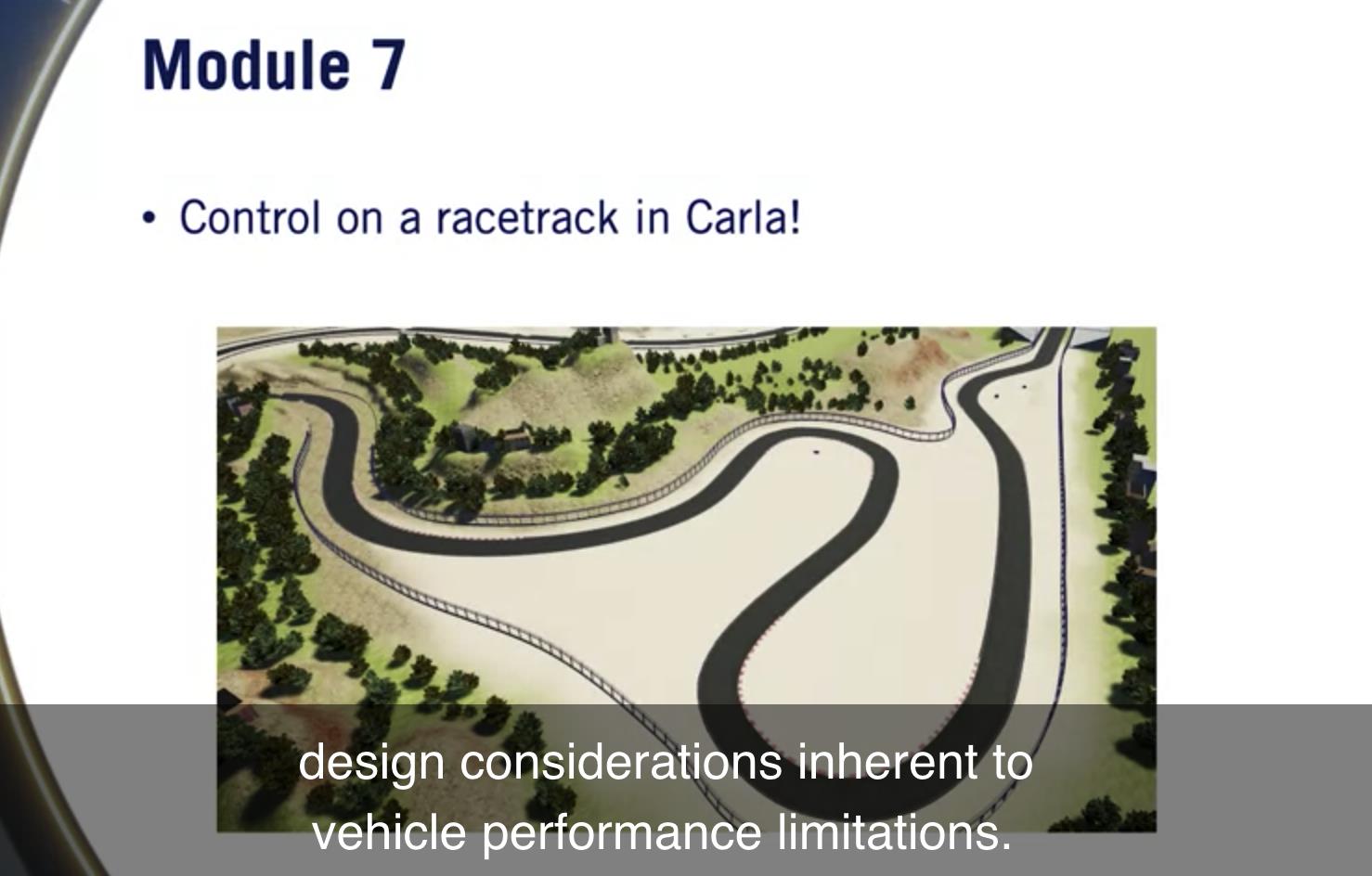
- 最后,在本课程的最后一个项目中,您将所有这些知识结合在一起 在无车模拟器中沿着赛道驾驶自动驾驶汽车。 您成功地测试了您的控制范围,并且 车辆性能限制所固有的设计考虑因素。
我们希望这是自我有益的第一门课程 驾驶汽车专业。 我们还需要做很多工作才能达到 5 级自动驾驶 社会。 但是现在应该意识到要考虑的许多基本挑战 在设计自动驾驶汽车时。
在下一门课程中,乔纳森将向您介绍状态估计和定位, 在这里您将学习数学和算法方法,例如 最小二乘法及其与三种不同类型的常见滤波器的关系。 用于递归地进行状态估计。
您还将了解更多关于一些常见的不同类型传感器的信息 在自动驾驶汽车中发现,包括 GNSS 和激光雷达。 然后学习如何进行传感器融合或如何组合多个来源 将数据转化为对您的自动驾驶汽车有用的信息。
你会在第三门课程中再次见到我,我将讨论视觉感知 自动驾驶汽车。
与此同时,你和乔纳森关系很好。 您正在掌握这些有助于我们构建的重要概念 自动驾驶的未来。 继续伟大的工作。
参考
https://www.coursera.org/learn/intro-self-driving-cars/lecture/QTBSD/congratulations-on-completing-course-1
以上是关于自动驾驶7-4 全部课程总结 恭喜您完成课程 1的主要内容,如果未能解决你的问题,请参考以下文章