自动驾驶7-2 最终项目概述 Final Project Overview
Posted 架构师易筋
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了自动驾驶7-2 最终项目概述 Final Project Overview相关的知识,希望对你有一定的参考价值。





您现在已经看到了Carla的一些功能,希望您有 机会下载模拟器并开始自己尝试。 现在我们已经有了一个工作模拟环境, 您已准备好开始实施和测试 您在本课程中学到的概念。 让我们来看看你将要完成的 本课程的最后一个项目。
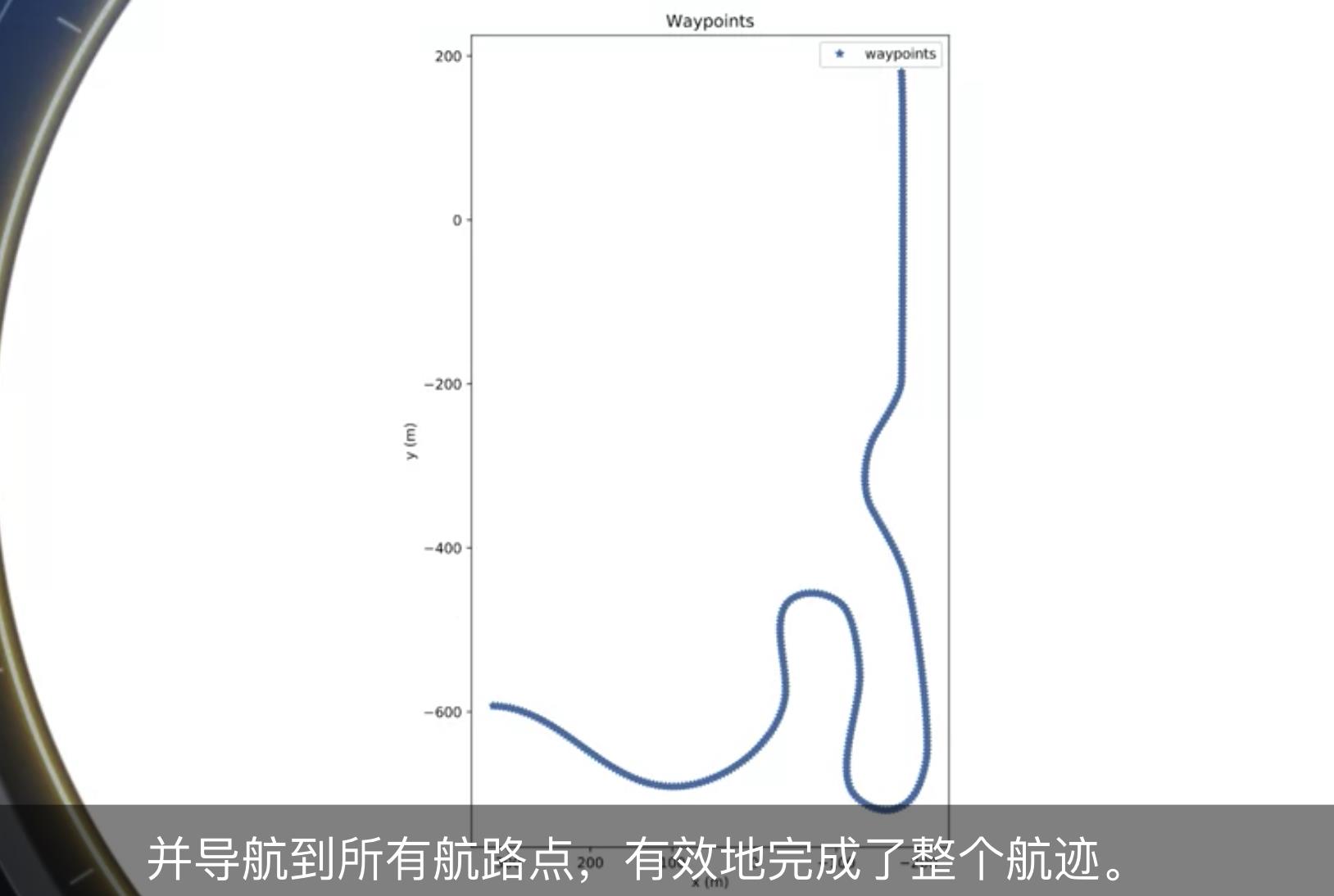
在此项目中, 您将实现一个简单控制器 通过Python,并使用它在Carla的轨道周围内驾驶汽车。 该轨道是此图所示的循环。 您将获得一个在此轨道上等距间隔的航点的排序列表。 航点包括他们的位置以及车辆应达到的速度。 因此,航点成为控制器的参考信号, 并导航到所有航路点,有效地完成了整个航迹。 由于控制器参考包含位置和速度, 您将需要实现纵向和横向控制。 您可能需要参考 纵向控制和横向控制模块,在开始项目之前。 控制器的输出将是车辆油门, 驻车器和转向角度命令。 油门和刹车将来自 您的纵向速度控制,转向来自您的横向控制。
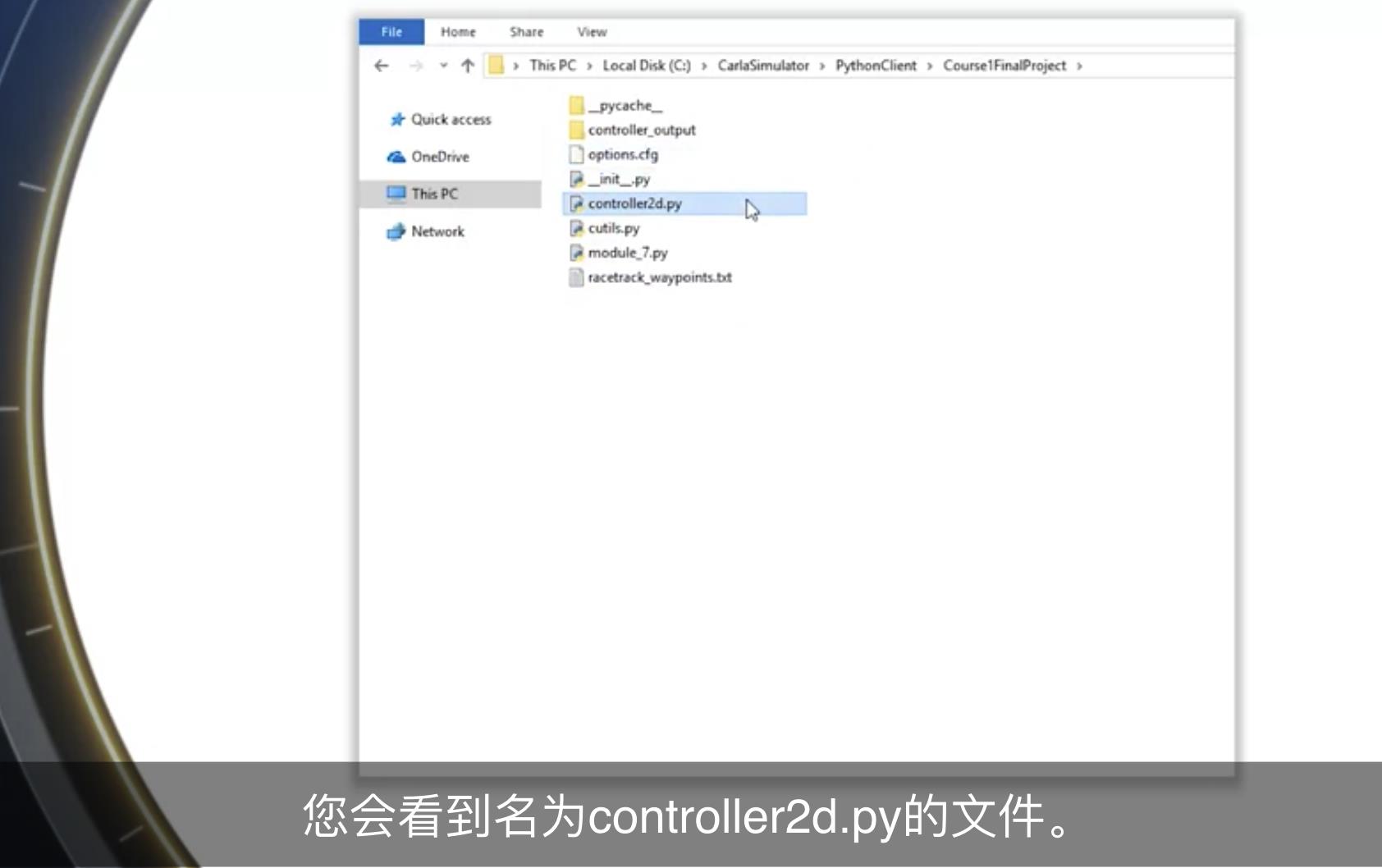
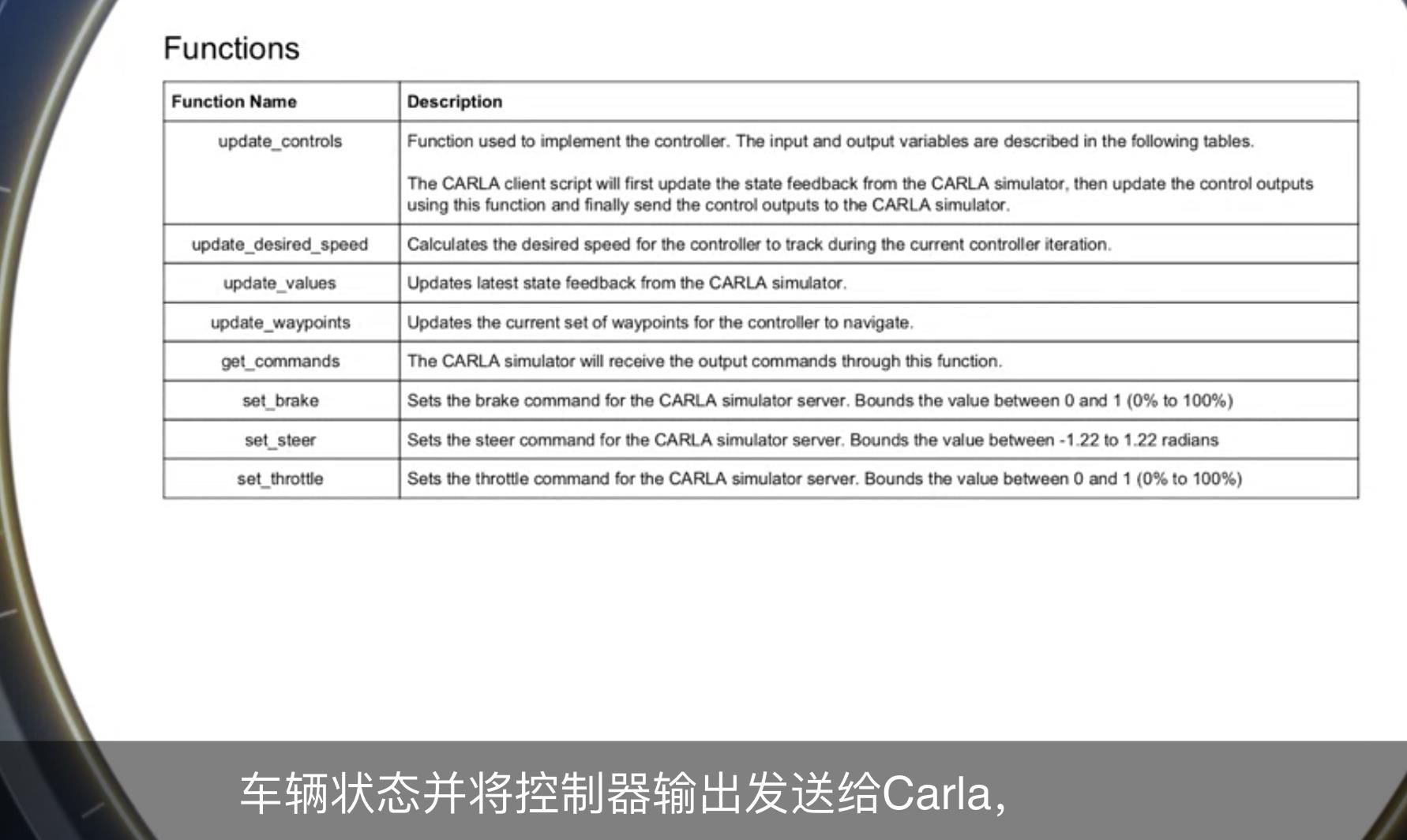
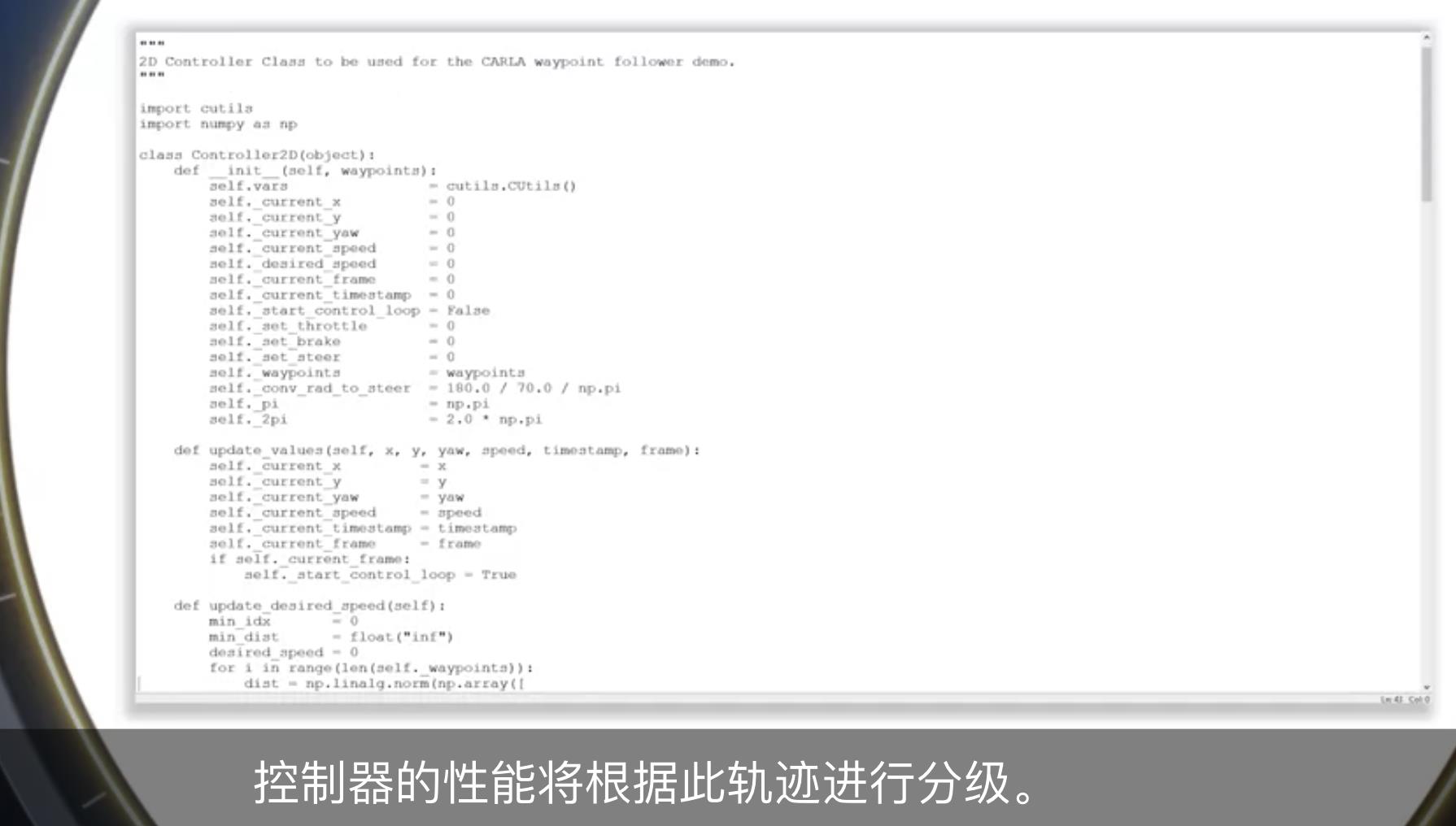
确保尽可能采用简单的控制器设计, 如果您的车辆没有按预期跟踪路径,则只会增加复杂性。 当然, 一旦你有了一个能用的控制器, 不要犹豫,突破极限,看看它在赛道上真正能做些什么。 那么,您打算如何为此项目构建代码? 我们为您准备了一个启动脚本,这样您就不必担心任何 Carla实现细节,您可以 专注于对控制器本身进行编程。 果打开模拟器目录并导航到Course one final project文件夹, 您会看到名为controller2d.py的文件。 这就是您将用作课程项目的起点。 当您打开此文件时, 您将看到通过Python类实现的车辆控制器。 该类包含与实现控制器相关的所有信息。 车辆状态,期望航路点,期望速度 和控制器输出存储在准备使用的变量中。 该类还包含将直接与Carla连接的函数。 这些功能将不断更新 车辆状态并将控制器输出发送给Carla, 使您可以专注于控制器实施。
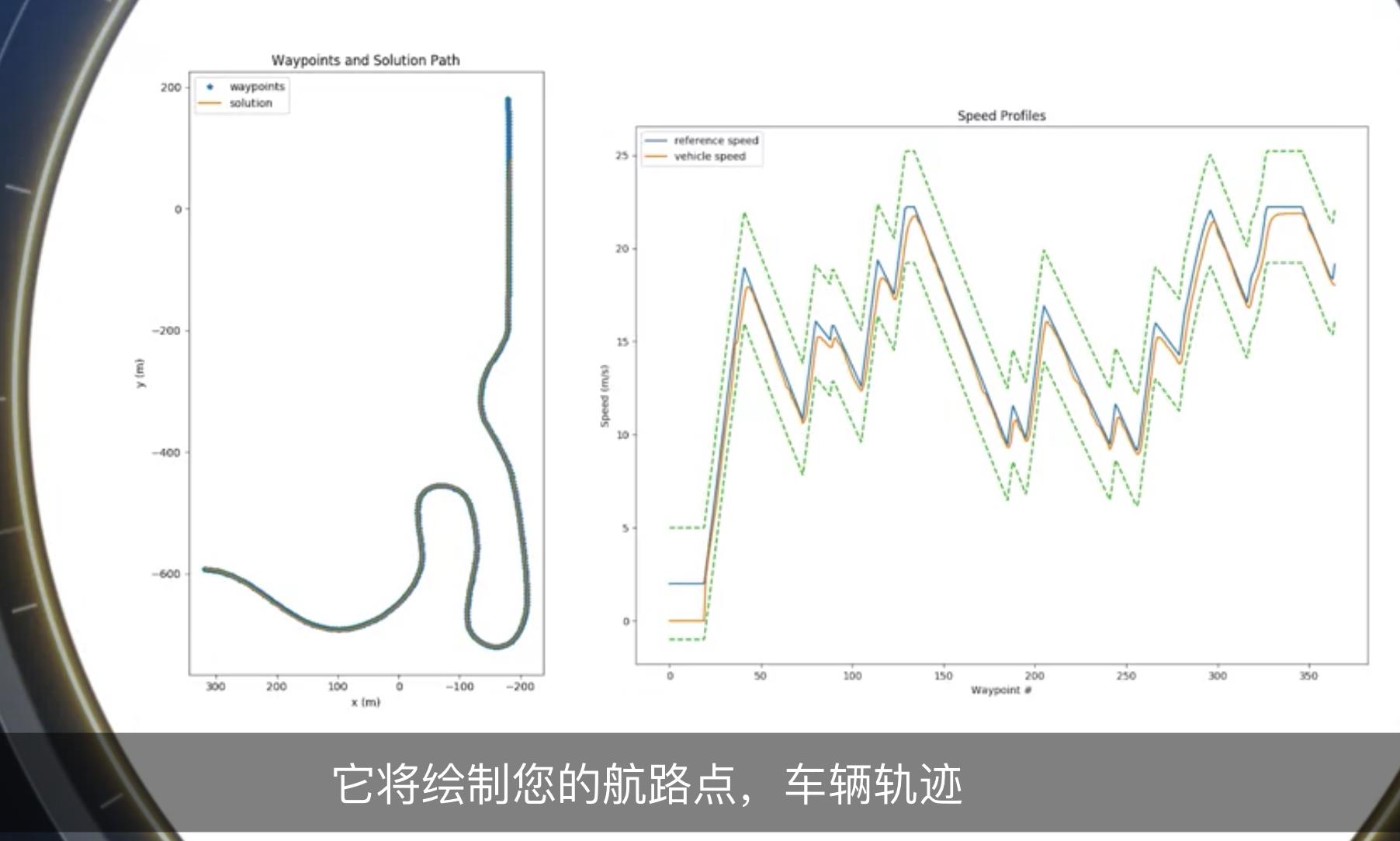
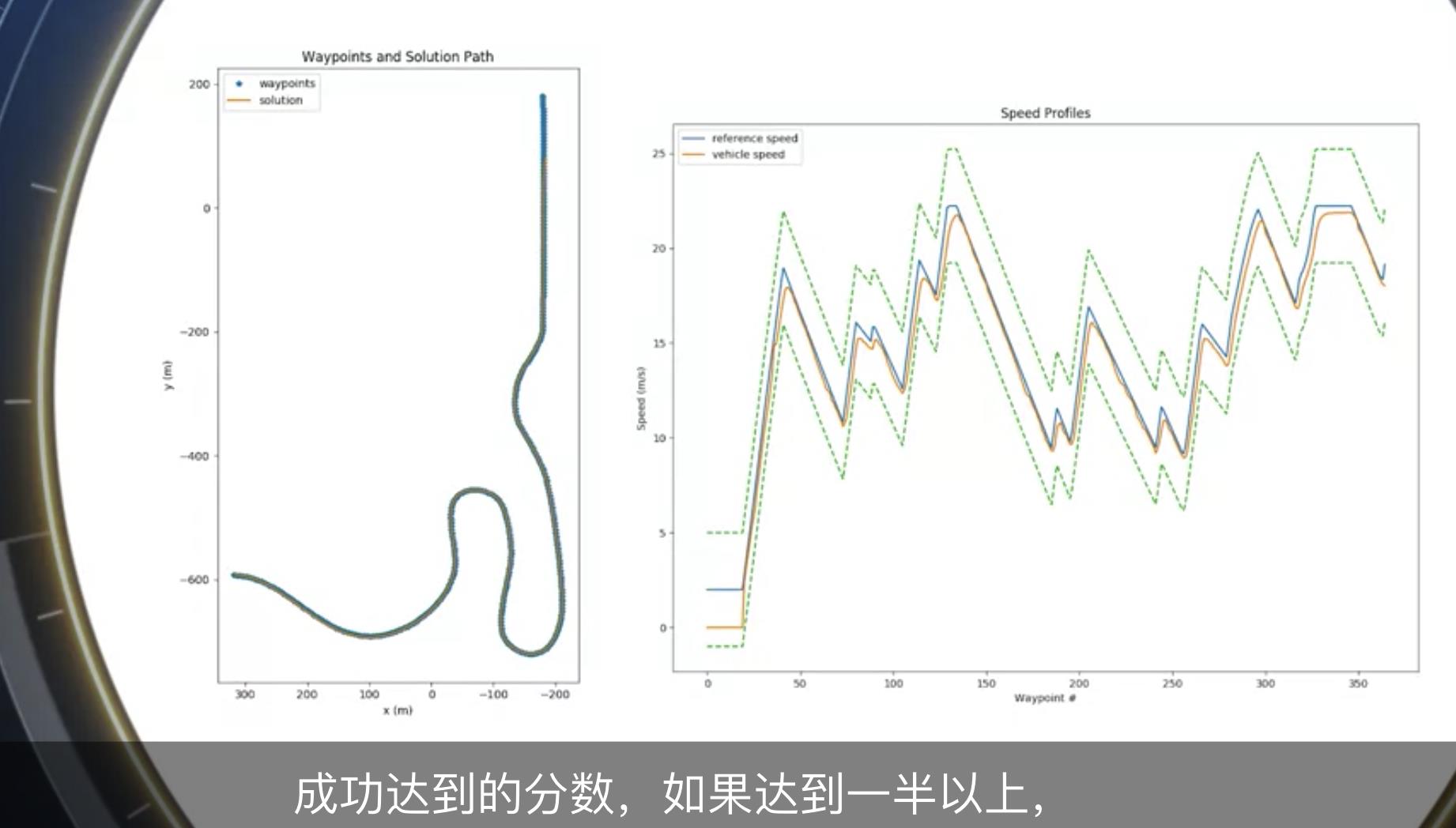
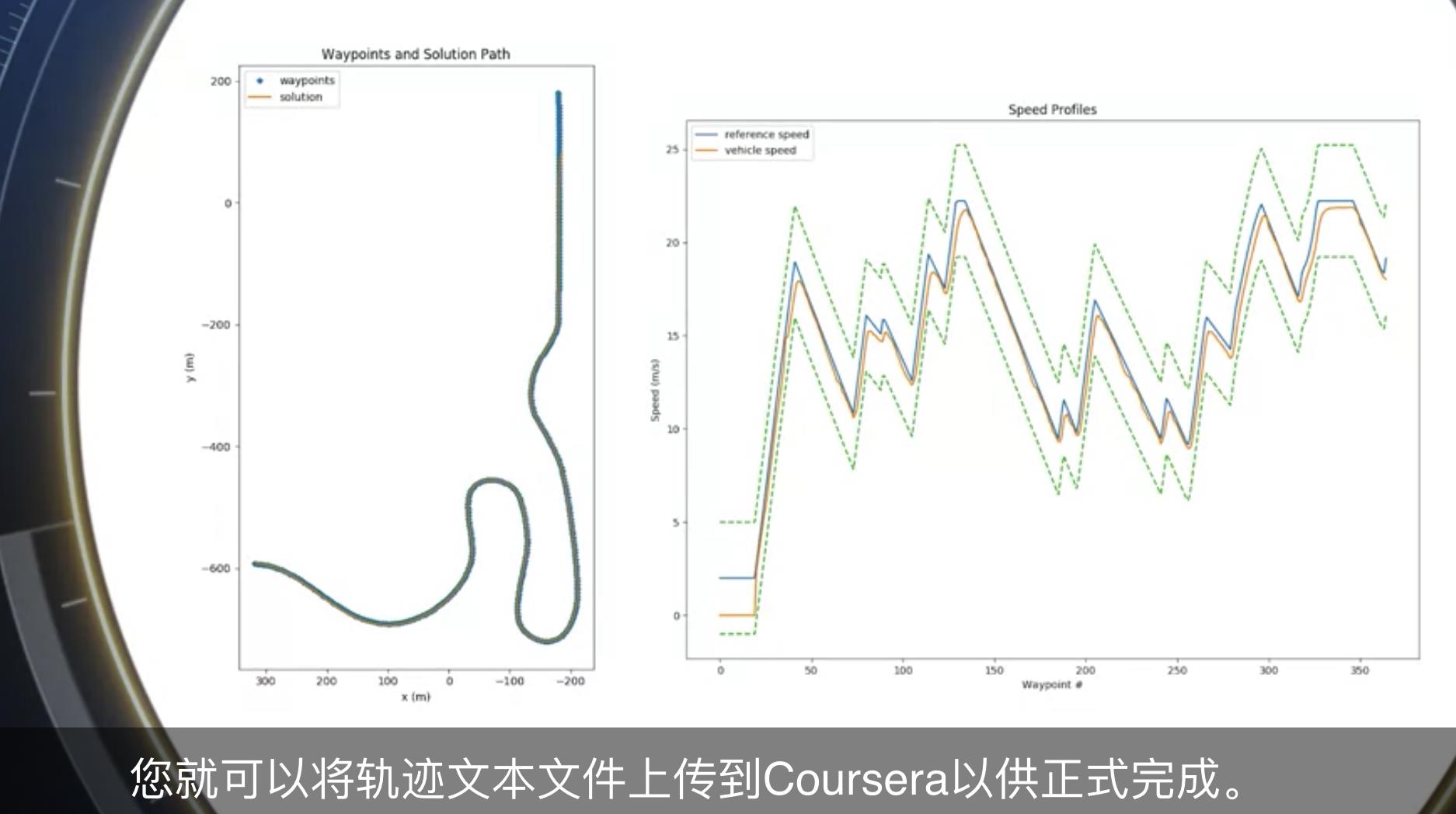
现在,您可能想知道如何 评估您的代码以及如何为此项目获得成绩。 运行控制器后, 将生成一个文本文件,记录车辆的整个轨迹。 此文件名为trajectory.txt,它位于控制器输出子文件夹中。 控制器的性能将根据此轨迹进行分级。 我们将使用Coursera平台来检查您的代码。 它将绘制您的航路点,车辆轨迹 和车辆速度与所需速度的对比。 每个航路点都有一个距离和速度阈值,以绿色显示。 认为成功到达航路点, 如果车辆轨迹在两个阈值内。 评分脚本会告诉您 成功达到的分数,如果达到一半以上, 您将通过评估。 一旦您的轨迹通过了评分脚本, 您就可以将轨迹文本文件上传到Coursera以供正式完成。
您现在拥有了所需的一切,以便实现 您的第一个控制器并在仿真中进行测试。 这是开发自动驾驶汽车的一大步, 也是您在现场看到的基本情景。 如果您在本视频中有任何我未回答的问题, 本模块的阅读材料中还有其他说明, 您也可以随时在论坛中提问。 我希望你能在这个最终项目中获得乐趣。并且我会再次见到您, 一旦您完成课程。祝好运。
参考
https://www.coursera.org/learn/intro-self-driving-cars/lecture/Ui266/lesson-2-final-project-overview
以上是关于自动驾驶7-2 最终项目概述 Final Project Overview的主要内容,如果未能解决你的问题,请参考以下文章