自动驾驶 | Apollo无人驾驶课程笔记3-定位
Posted 人工智能博士
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了自动驾驶 | Apollo无人驾驶课程笔记3-定位相关的知识,希望对你有一定的参考价值。
在公众号【计算机视觉联盟】后台回复【9076】获取我的AI学习笔记;我的微信:Kingsplusa; --by 王博Kings,985AI博士,CSDN博客专家,华为云专家
本系列《无人驾驶干货铺》笔记:
自动驾驶 | Apollo无人驾驶课程笔记1--无人驾驶概览
第三课:定位
课程简介: 了解车辆如何以个位数厘米级别的精度进行自定位。
1. 定位简介
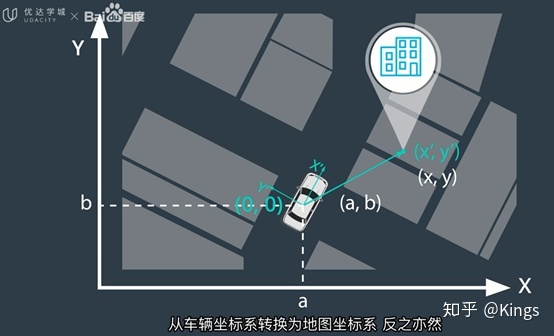
2.Sebastian介绍定位
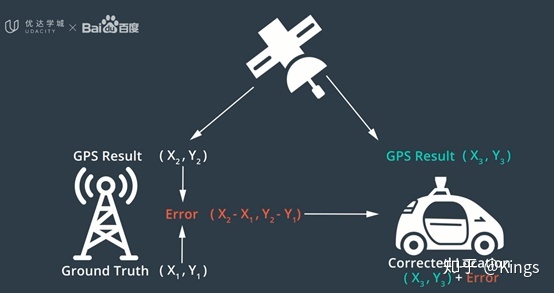
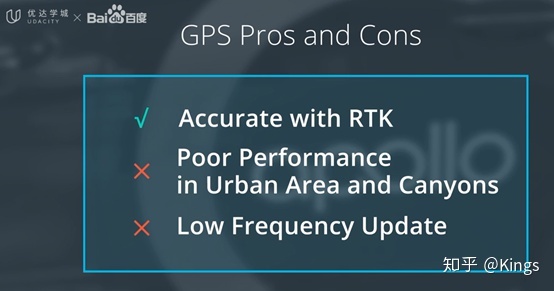
3.GNSSRTK_a
4.GNSSRTK_b

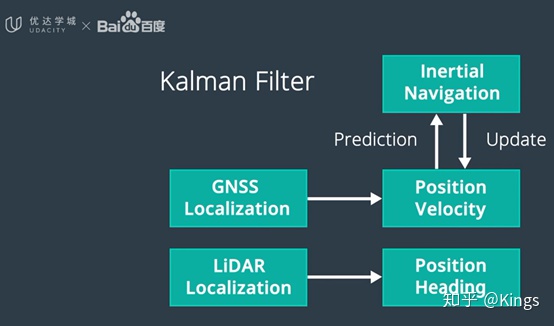
5.惯性导航_a
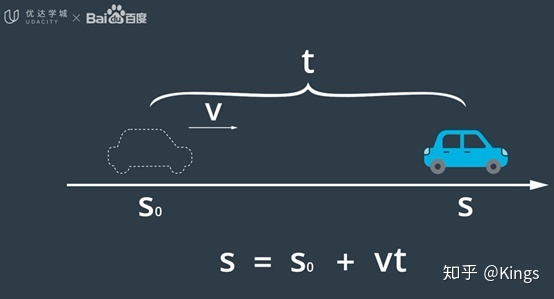
6.惯性导航_b
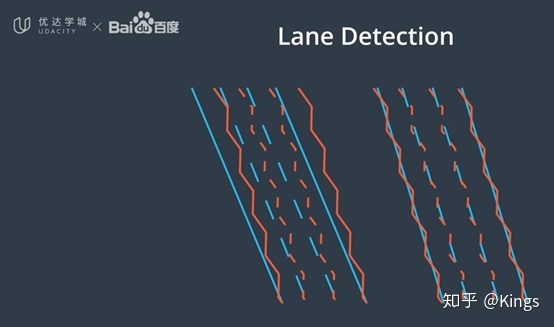
7.激光雷达定位
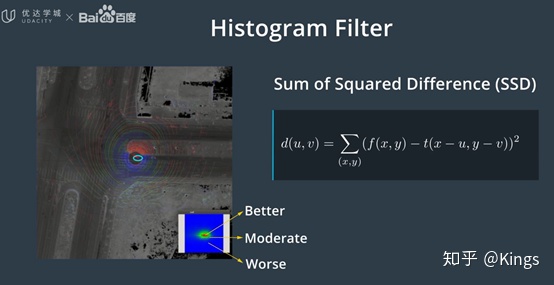
8.视觉定位
9.Apollo定位
以上是关于自动驾驶 | Apollo无人驾驶课程笔记3-定位的主要内容,如果未能解决你的问题,请参考以下文章