OpenCV相机标定笔记
Posted 语音余音玉印
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了OpenCV相机标定笔记相关的知识,希望对你有一定的参考价值。
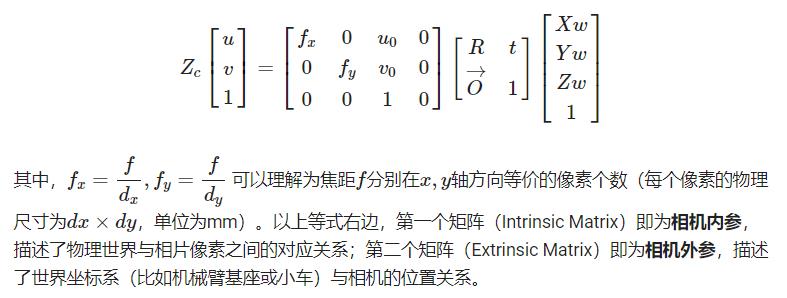
OpenCV相机标定
环境准备
vs2015+opencv4.10安装与配置
https://blog.csdn.net/weixin_44718794/article/details/104775010
找不到opencv_world410d.dll,无法执行代码,重新安装程序可能会解决此问题
https://blog.csdn.net/Feeryman_Lee/article/details/106114718

相机标定
棋盘格图片
可以自己生成,然后打印到A4纸上。(也可以去TB买一块,平价买亚克力板的,不反光买氧化铝材质,高精度买陶瓷的)
/**
* 生成棋盘格图片
**/
int generateCalibrationPicture()
//Mat frame = imread("3A4.bmp"); // cols*rows = 630*891
Mat frame(1600, 2580, CV_8UC3, Scalar(0, 0, 0));
int nc = frame.channels();
int nWidthOfROI = 320;
for (int j = 10; j<frame.rows - 10; j++)
uchar* data = frame.ptr<uchar>(j);
for (int i = 10; i<(frame.cols - 10)*nc; i += nc)
if ((i / nc / nWidthOfROI + j / nWidthOfROI) % 2)
// bgr
data[i / nc*nc + 0] = 255;
data[i / nc*nc + 1] = 255;
data[i / nc*nc + 2] = 255;
imshow("test", frame);
//imwrite("3.bmp", frame);
waitKey(0);
return 0;

实时显示相机的画面
准备一个相机,我的是usb相机(罗技100多的)。
int displayCameraRealTime()
//1.从摄像头读入视频
VideoCapture capture(0);
if (!capture.isOpened())
std::cout << "无法开启摄像头!" << std::endl;
return -1;
//2.循环显示每一帧
while (1)
Mat cam;
capture >> cam;//获取当前帧图像
namedWindow("实时相机画面", WINDOW_AUTOSIZE);
imshow("实时相机画面", cam);//显示当前帧图像
//imwrite(to_string(i) + ".png", cam);
waitKey(20);//延时20ms
效果如下图:

在线标定
把打印的棋盘格固定在板子上
/**
* 实时检测角点,按键保存角点参数,达到数量执行标定并保存标定结果
* @param numBoards 需要几张标定图片,即获取几组角点参数
* @param boardSize 格子尺寸Size 7*4
* @param squareSize 格子尺寸 mm
* @param flipHorizontal 是否翻转
*/
int calibrateCameraRealTime(int numBoards, cv::Size boardSize, float squareSize = 1, int delay = 50, bool flipHorizontal = false);
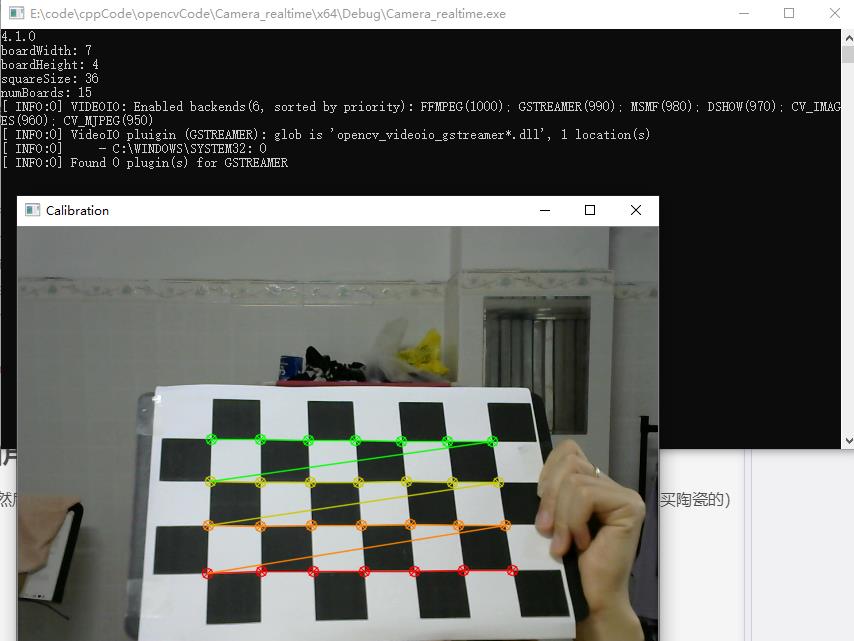
实时显示相机画面,按键保存能检测到角点的 棋盘格图片
int saveChessboardImages(cv::Size boardSize, string savePath)
//1.从摄像头读入视频
VideoCapture capture(0);
if (!capture.isOpened())
std::cout << "无法开启摄像头!" << std::endl;
return -1;
if (savePath != "./")
myMkdir(savePath);
//2.循环显示每一帧
while (1)
Mat image0, image;
capture >> image0;
// 将图像复制到image
image0.copyTo(image);
// 查找标定板(不对称圆网格板)
vector<Point2f> corners;
//bool found = findCirclesGrid(image, boardSize, corners, CALIB_CB_ASYMMETRIC_GRID);
bool found = findChessboardCorners(image, boardSize, corners, CALIB_CB_FAST_CHECK);
// 画上去
drawChessboardCorners(image, boardSize, corners, found);
int action = waitKey(30) & 255;
// 判断动作
if (action == ACTION_SPACE) // 用户按下了空格
if (found)
// 保存图片
string imgFileName = savePath + getCurrentTime() + ".png";
imwrite(imgFileName, image0);
cout << imgFileName << " saved" << endl;
else
printf("%s\\n", "未检测到角点");
else if (action == ACTION_ESC) // 用户按下了ESC
break;
cv::imshow("Calibration", image);
cv::destroyAllWindows();
return 1;
离线标定
/**
* 离线相机标定
* @param imagePath 标定图片存放路径
* @param boardSize 格子尺寸Size 7*4
* @param squareSize 格子尺寸 mm
*/
int calibrateCameraOffLine(string imagePath, const Size boardSize, float squareSize = 1);
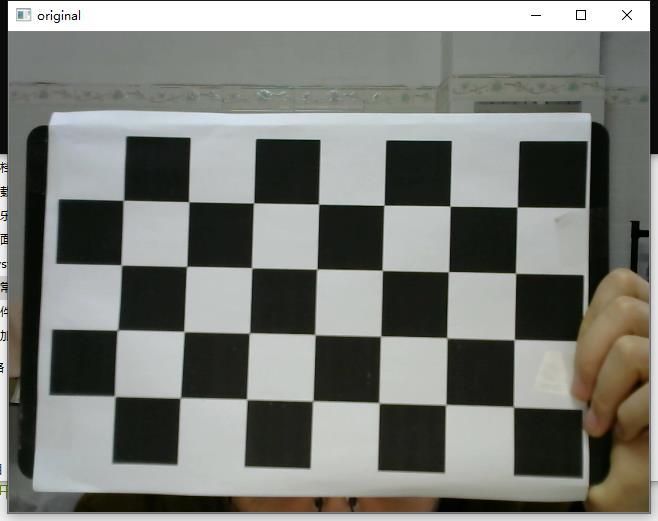
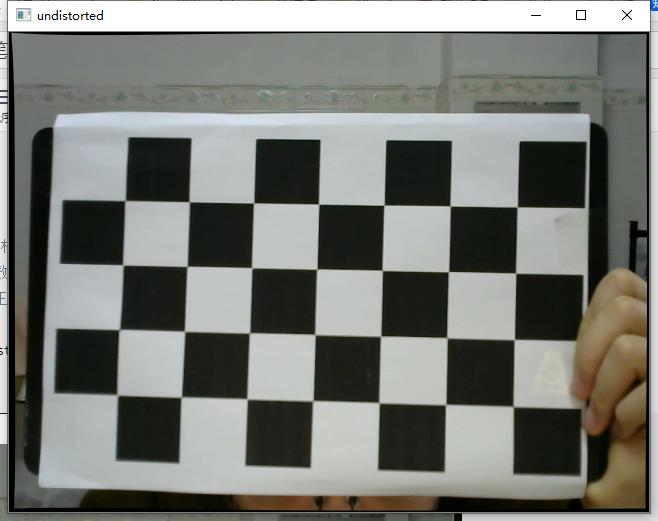
畸变矫正
/**
* 去畸变 1、本地图片 2、实时相机图像
* @param path 标定参数存放路径
* @param imagePath 需要矫正的图片 存放路径
*/
int undistortRectifyImage(string paraPath, string imagePath = " ");
矫正效果貌似不明显
完整工程地址:
https://gitee.com/xuruilong111/camera-calibration-open-cv.git
参考
https://blog.csdn.net/dcrmg/article/details/52939318
《学习OpenCV3》
以上是关于OpenCV相机标定笔记的主要内容,如果未能解决你的问题,请参考以下文章
MatLab和OpenCV共同实现单目相机标定实验--附标定图片
opencv学习-实战篇-ROS18.04+Opencv-相机标定+物体识别(持续更新)