opencv学习-实战篇-ROS18.04+Opencv-相机标定+物体识别(持续更新)
Posted 殇堼
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了opencv学习-实战篇-ROS18.04+Opencv-相机标定+物体识别(持续更新)相关的知识,希望对你有一定的参考价值。
安装摄像头
启动摄像头
使用以下启动文件测试相机是否能正常工作
roslaunch usb_cam usb_cam-test.launch
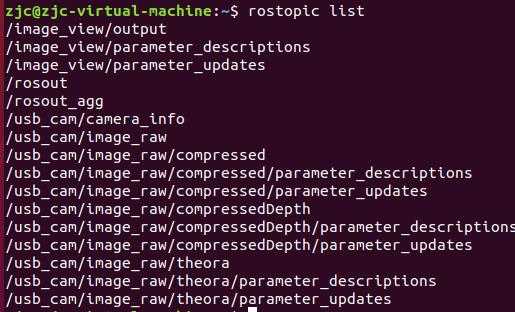
查询摄像头的驱动发布的话题
rostopic list
查看该话题发布的消息类型
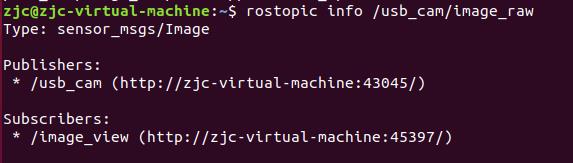
摄像头就是usb_cam/image_raw这个话题,查看它发布的消息的具体类型
rostopic info /usb_cam/image_raw
类型是sensor_msgs/Image
查看该消息发布的数据
rosmsg show sensor_msgs/Image
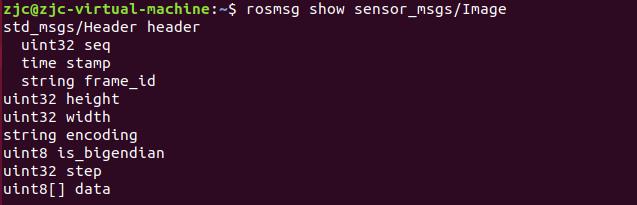
std_msgs/Header header//消息头,包含消息序号,时间戳和绑定坐标系。
uint32 seq//消息序号
time stamp//时间戳
string frame_id//绑定坐标系
uint32 height//图像的纵向分辨率
uint32 width//图像的橫向分辨率
string encoding//图像的编码格式,包含RGB、YUV等常用格式
uint8 is_bigendian//图像数据大小端存储模式
uint32 step//一行数据的字节数量,作为数据的步长参数
uint8[] data//存储图像数据的数组
相机标定
安装标定的功能包:
sudo apt-get install ros-melodic-camera-calibration
启动相机:
roslaunch robot_vision usb_cam.launch
启动标定包:
rosrun camera_calibration cameracalibrator.py --size 8x6 --square 0.024 image:=/usb_cam/image_raw camera:=/usb_cam
安装opencv
sudo apt-get install ros-melodic-vision-opencv libopencv-dev python-opencv
reference
ubuntu16.04下ROS操作系统学习笔记(六 )机器视觉-摄像头标定-ROS+OpenCv-人脸识别-物体跟踪-二维码识别
●usb_ cam
http://wiki.ros.org/usb cam
●sensor_ msgs
http://wiki.ros.org/sensor msgs
●cV bridge Tutorials
http://wiki.ros.org/cv_ bridge/Tutorials
●OpenCV Tutorials
https://docs.opencv.org/master/d9/df8/tutorial root.html
以上是关于opencv学习-实战篇-ROS18.04+Opencv-相机标定+物体识别(持续更新)的主要内容,如果未能解决你的问题,请参考以下文章