环境搭建 - 奥比中光3D摄像头(Deeyea)
Posted 炼丹狮
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了环境搭建 - 奥比中光3D摄像头(Deeyea)相关的知识,希望对你有一定的参考价值。
搭建奥比中光3D摄像头运行环境
因为导师的手部动态姿态项目要用到奥比中光的3D摄像头,因此就需要搭建环境来调用摄像头的API来做相关的东西,下面就是搭建的全过程,文章以前在奥比中光的论坛里面(原文),我做了点优化现在放到CSDN中。希望对大家有些帮助 o( ̄︶ ̄)o
1. 开发环境搭建
我使用的是vs2013,当然vs2019也同样可以,vs2019的资源也是到处都有,请自行搜索
VS2013的中转路径:地址
但是官网路径下载太慢,提供了网盘的下载 ↓
链接:https://pan.baidu.com/s/1dBS3ht_t-AU0idTHvl8wlw
提取码:yu3o
下载完成后,正常安装就行,激活码随便网上搜下就行。
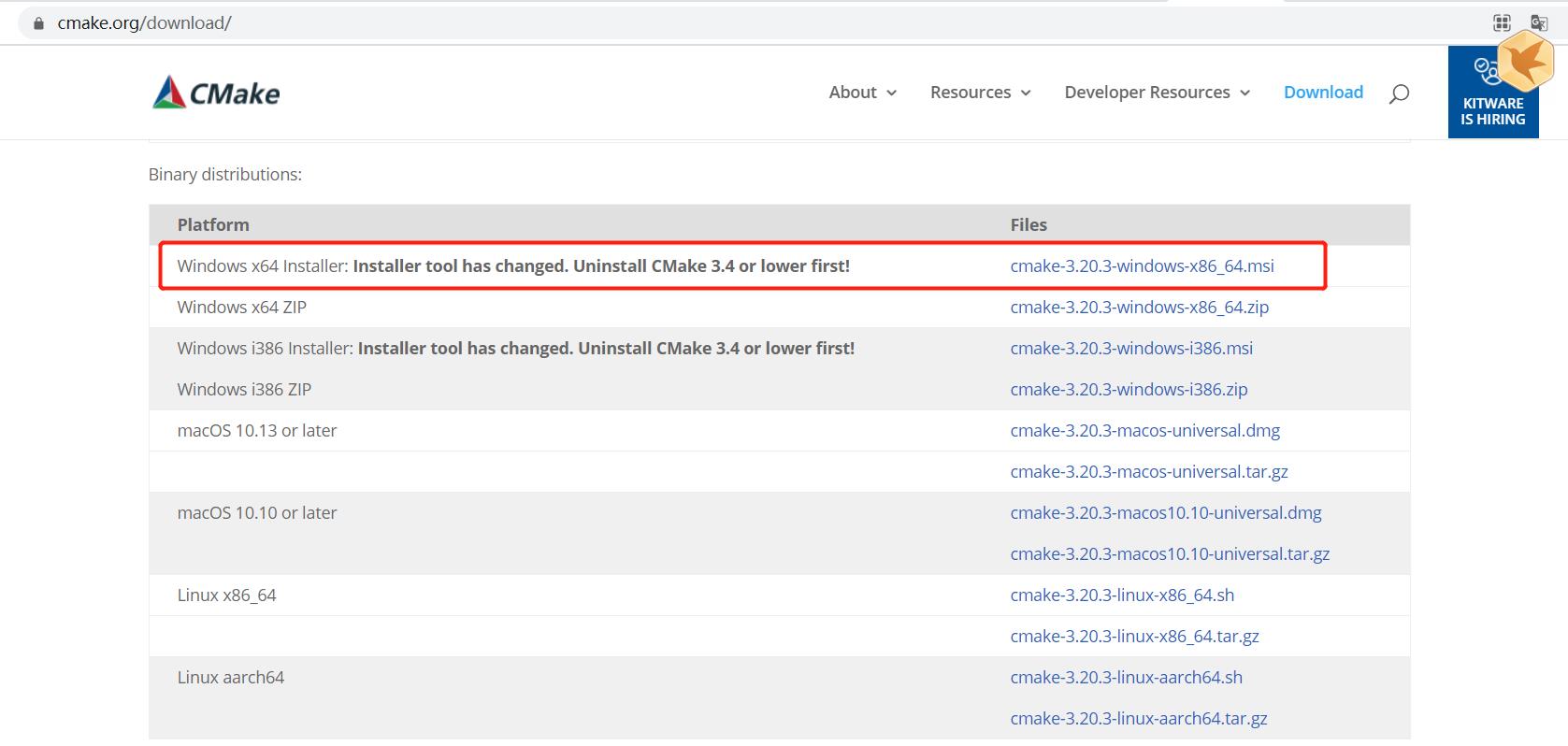
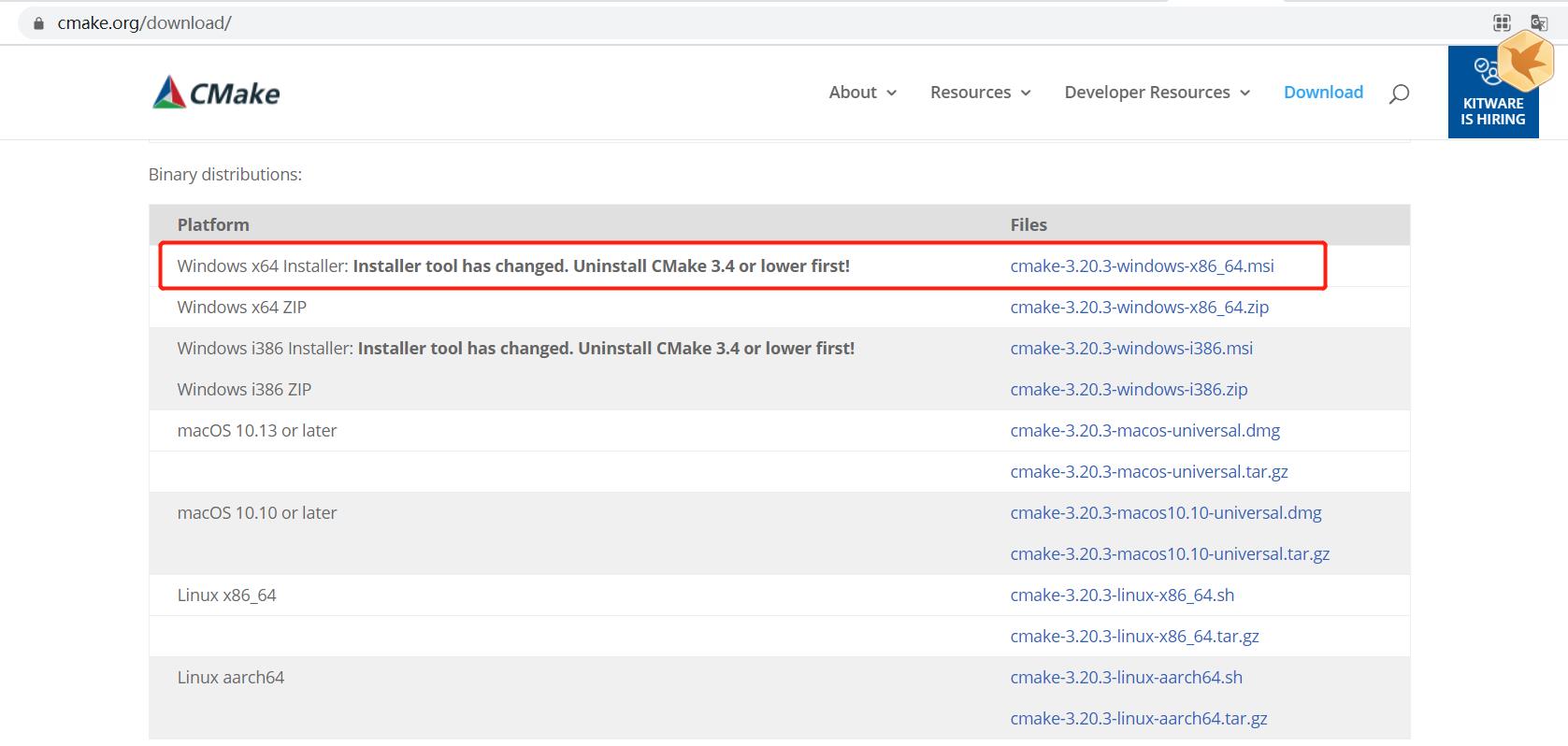
2. Cmake环境
安装cmake的目的是为了重新生成下载sdk里面sample工程,里面的一些相对路径有问题。
进入官网:https://cmake.org/download/
找到自己的对应的版本下载即可
3. SDK安装
https://developer.orbbec.com.cn/download.html?id=56
按照自己的vs版本下载就行,我下载的是vs2013 64位版本的
运行官方示例sample步骤
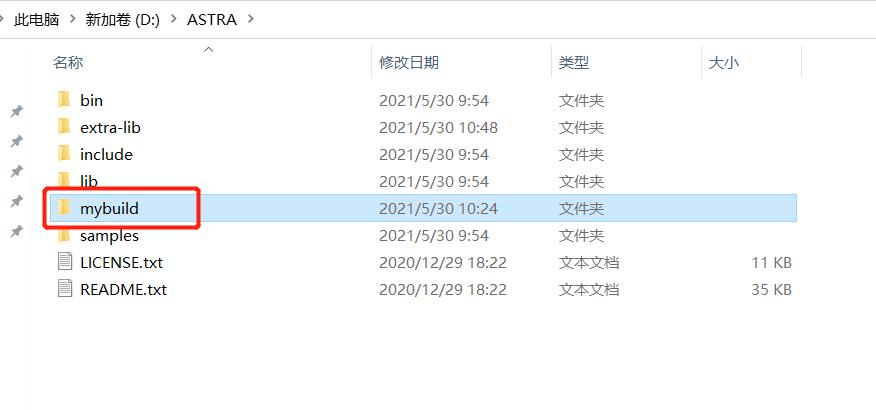
解压下载好的sdk,解压到任意目录,例如D:盘,如下:
新建一个要重新生成的vs项目的目录:
例如:D:\\ASTRA\\mybuild
启动cmake,重新生成项目
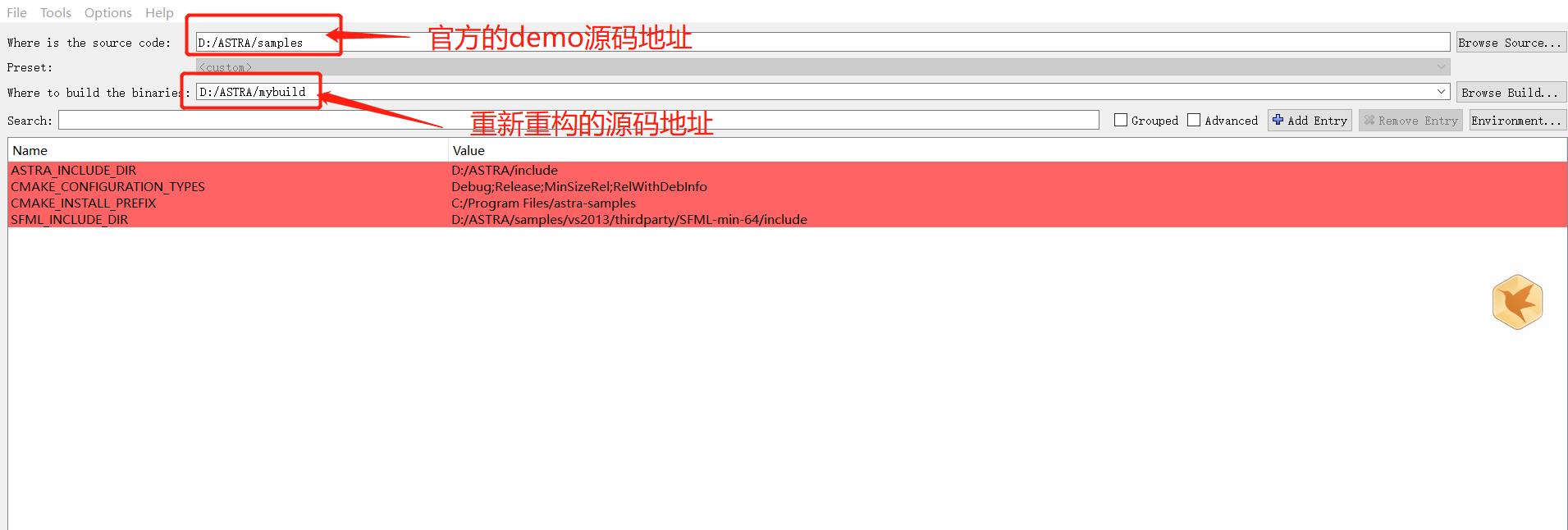
配置项目
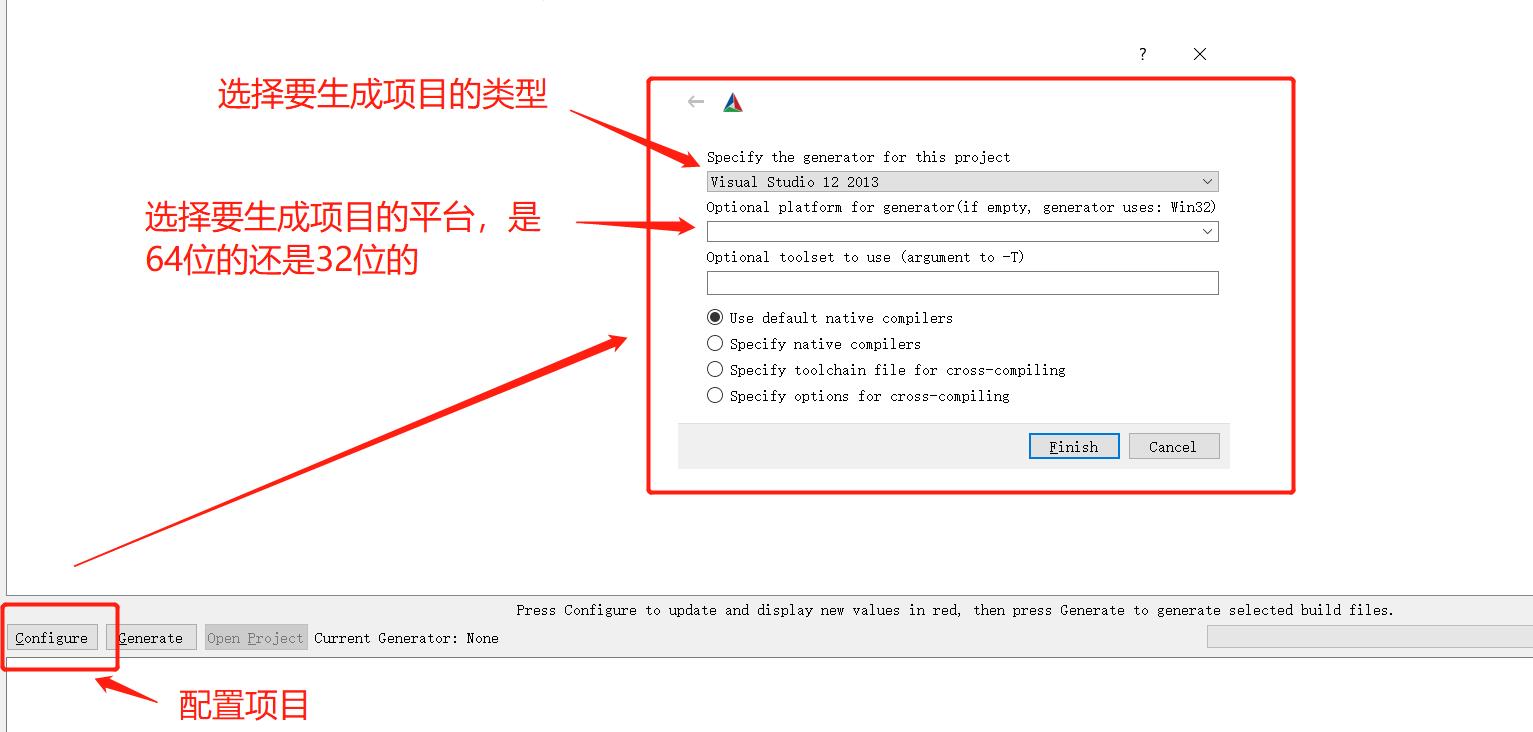
然后点击 Finish。
成功后,可以“Ganerate”,就可以生成项目了。
成功后,点击open Project,可以打开相应的项目。

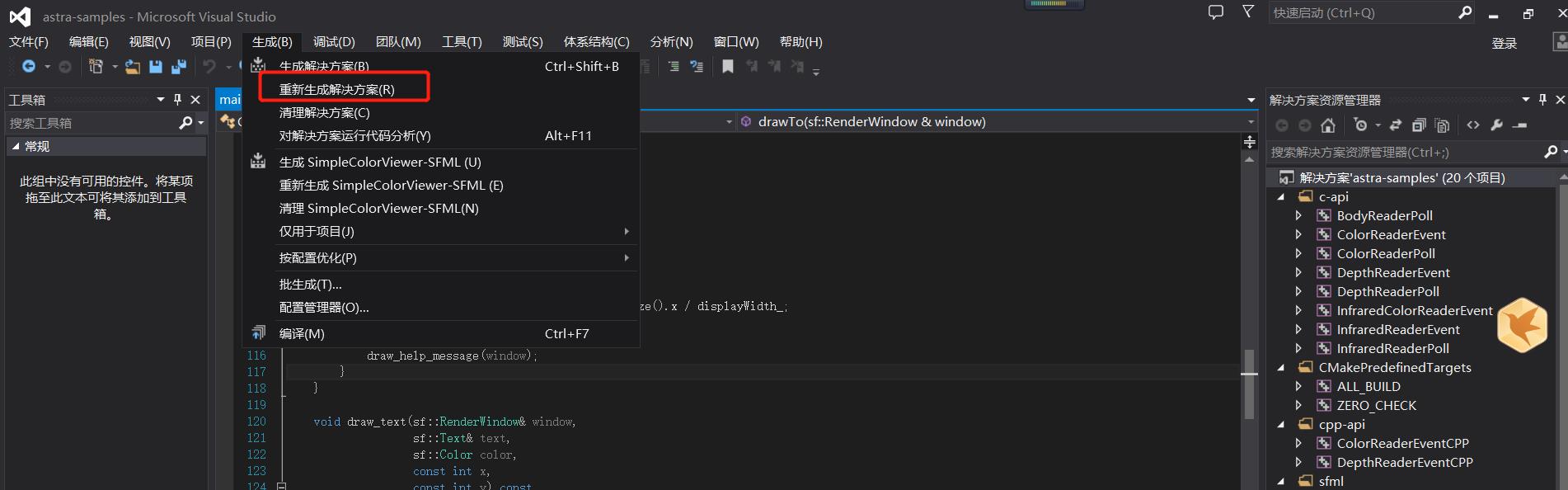
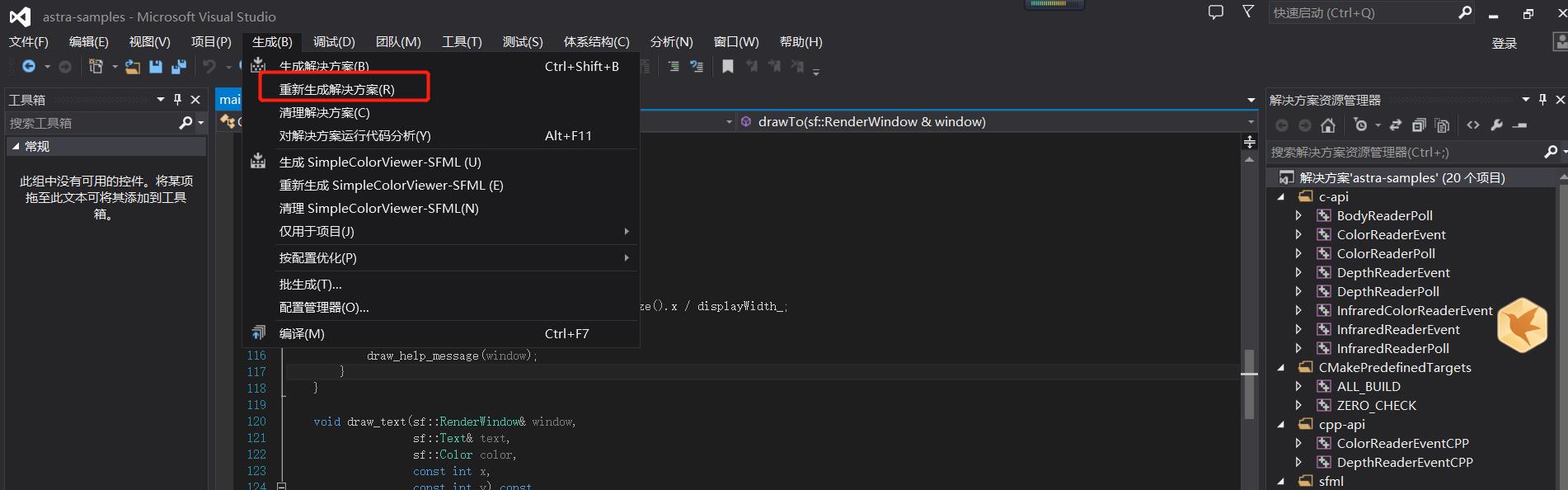
至此,项目可正常打开了,点击“重新生成解决方案”也能正常生成,但是debug的时候会提示,xxx.dll丢失
4. Debug项目
按照官方文档,把相应的 “附加包含目录”,“附加目录库”,“附加依赖项”都加进去了,还是不行。
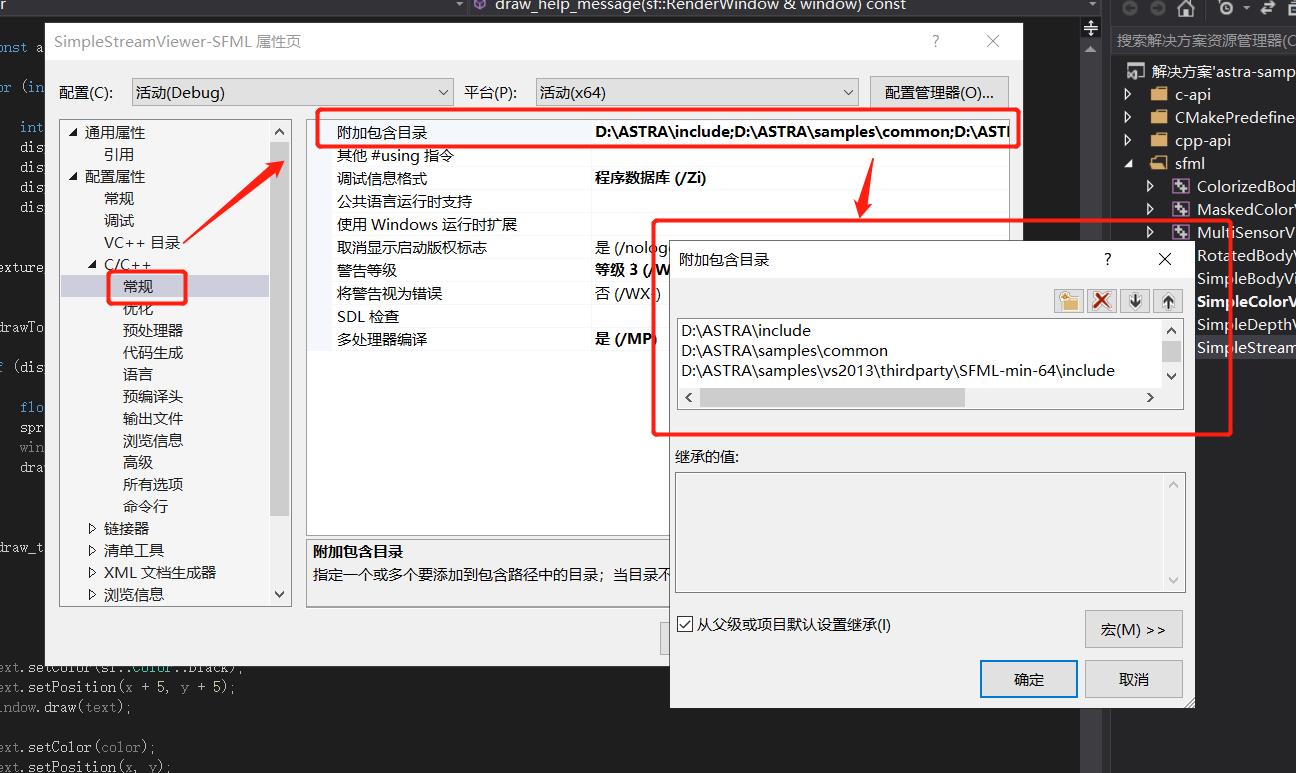
4.1 进入“属性”菜单:
4.2 添加包含目录:
在“ C / C ++”部分的常规配置项下,找到“附加包含目录”并加入“ $(ASTRA_HOME)\\ include文件名称
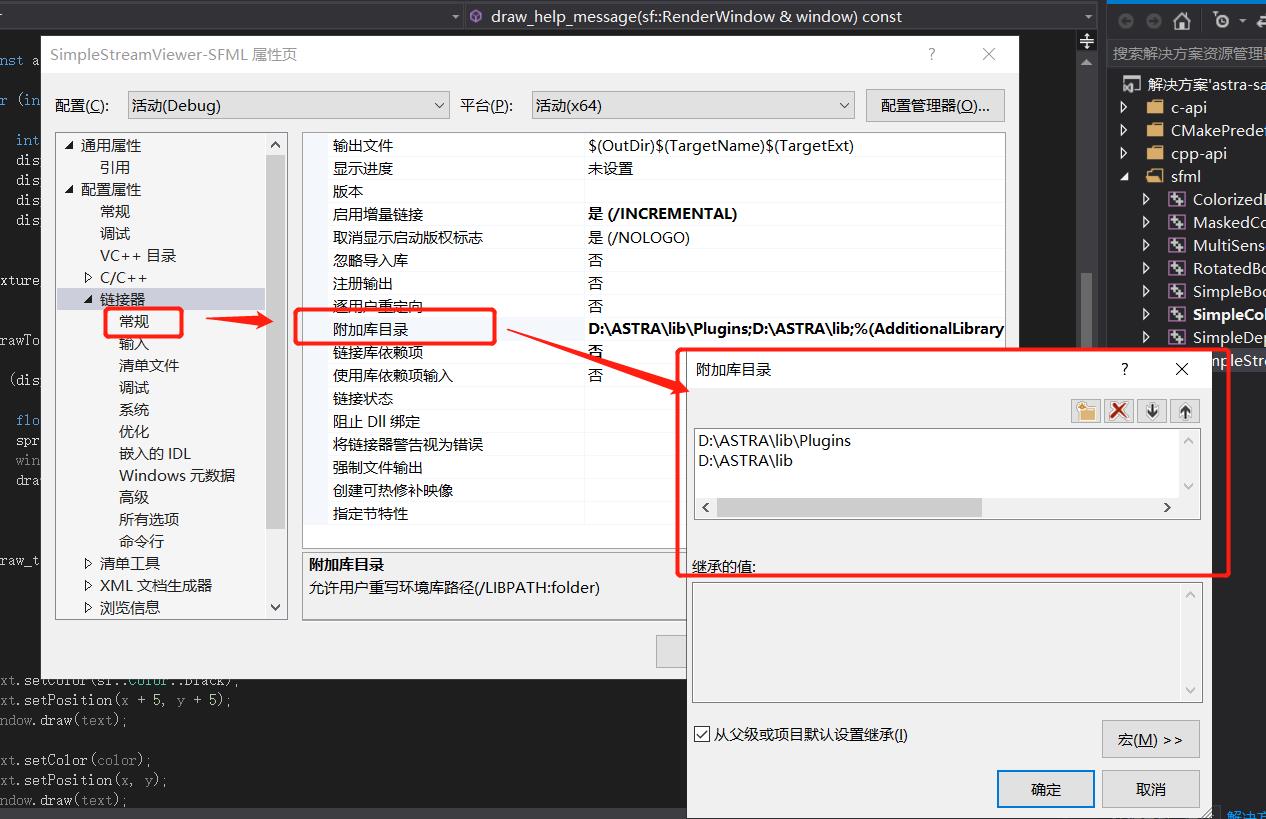
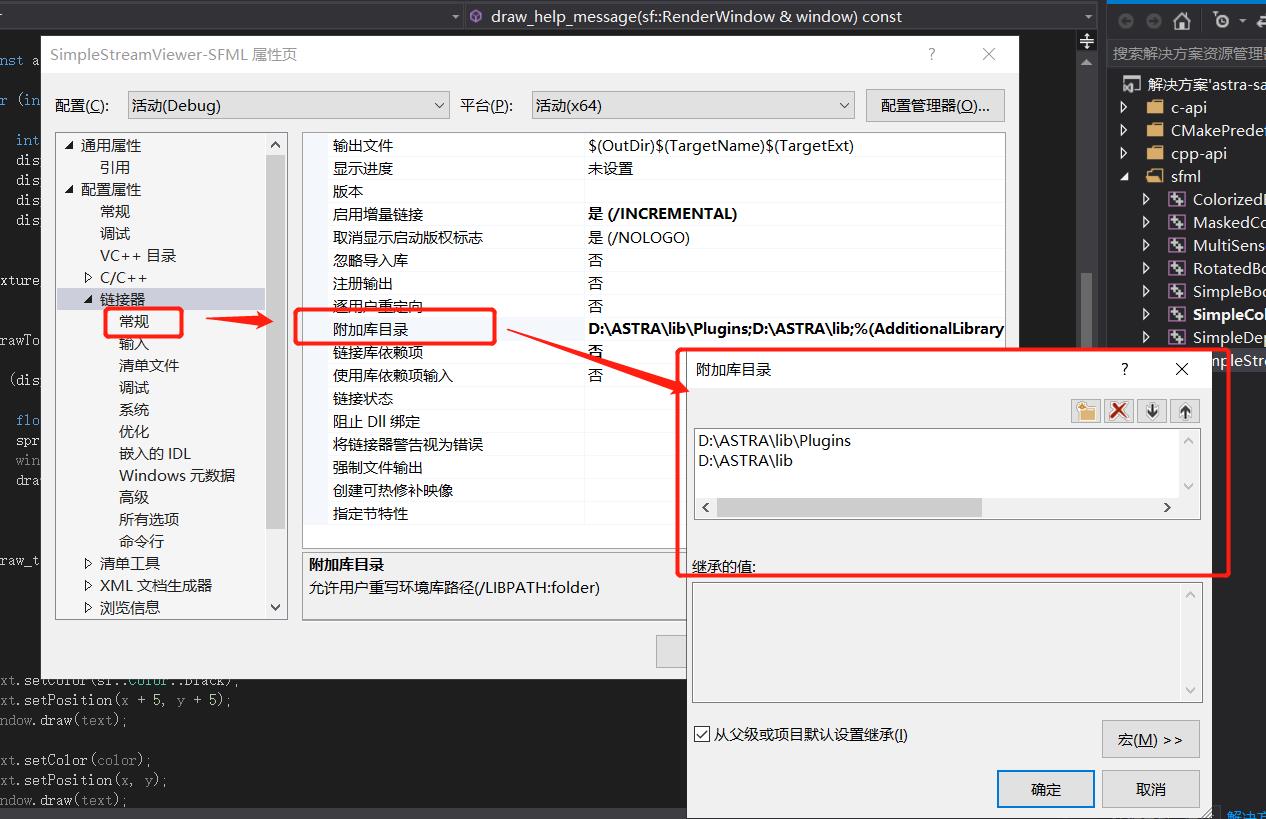
4.3 添加附加目录库
在链接器的常规配置项下,找到“附加库目录”并加入“ $(ASTRAHOME)\\ lib”,“ $(ASTRAHOME)\\ lib \\ Plugins” 文件名称。
4.4 添加附加依赖项
在链接器的输入配置项下,找到“附加依赖项”,然后加入 astra.lib、astracore.lib、astracore_api.lib 文件库名称。
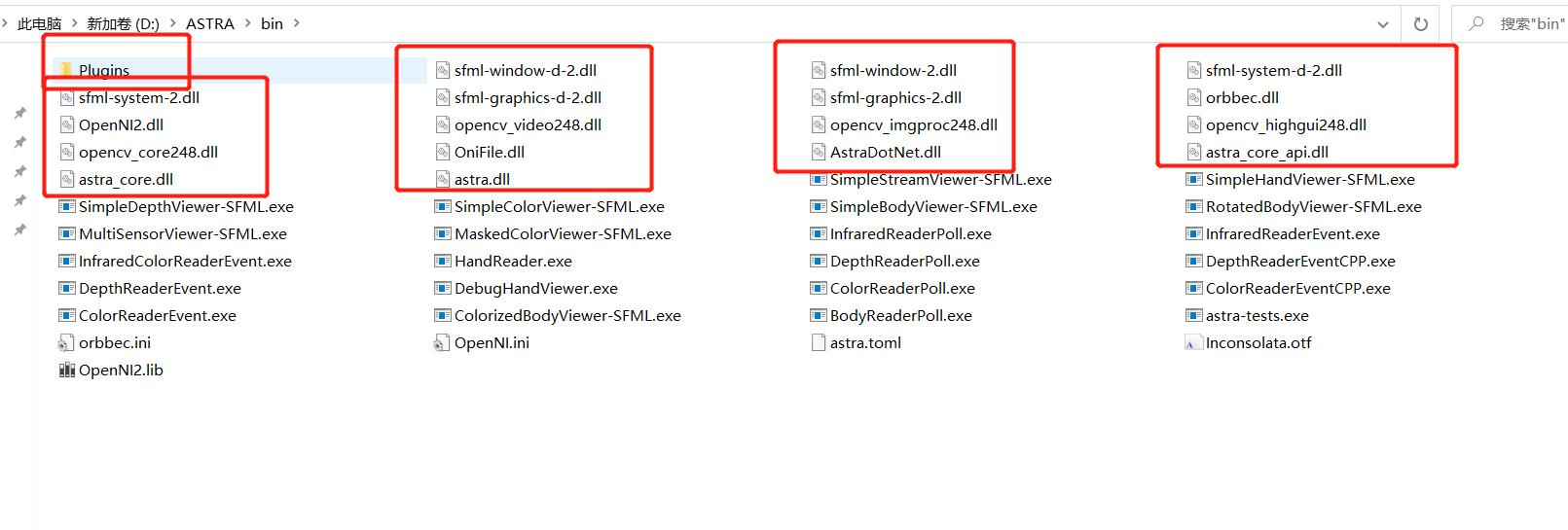
4.5 添加DLL
在debug目录,手动添加上所有的dll文件
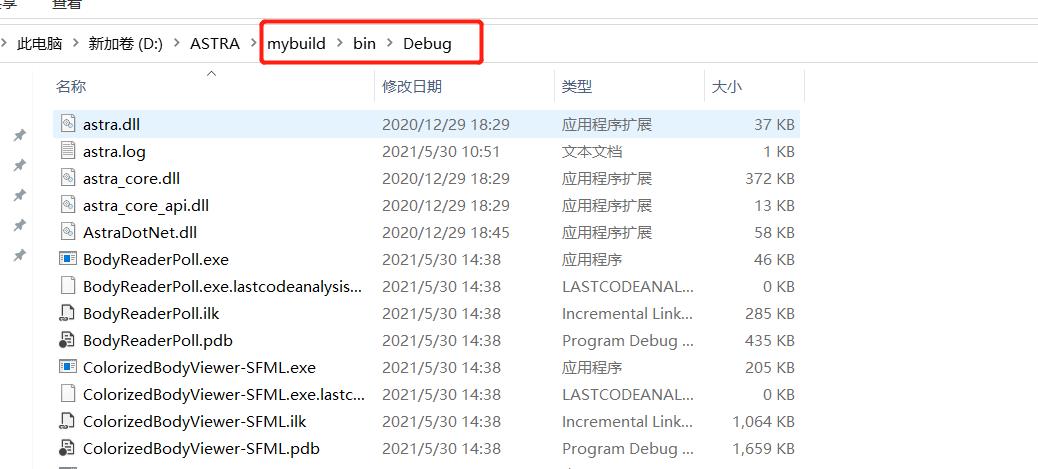
复制bin目录和Plugins目录下的所有dll文件,到debug目录
复制到重构工程的bin\\debug目录下,就正常debug了。
4.6 运行
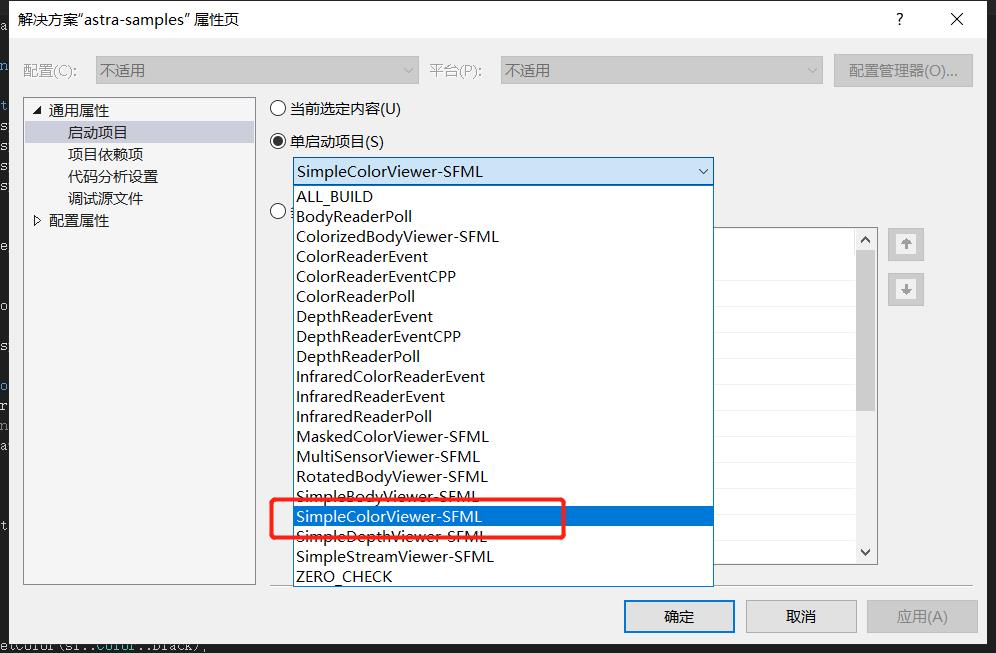
因为整个sample是一个大的解决方案,如果要debug的话要选一个启动项:
选择一个启动项
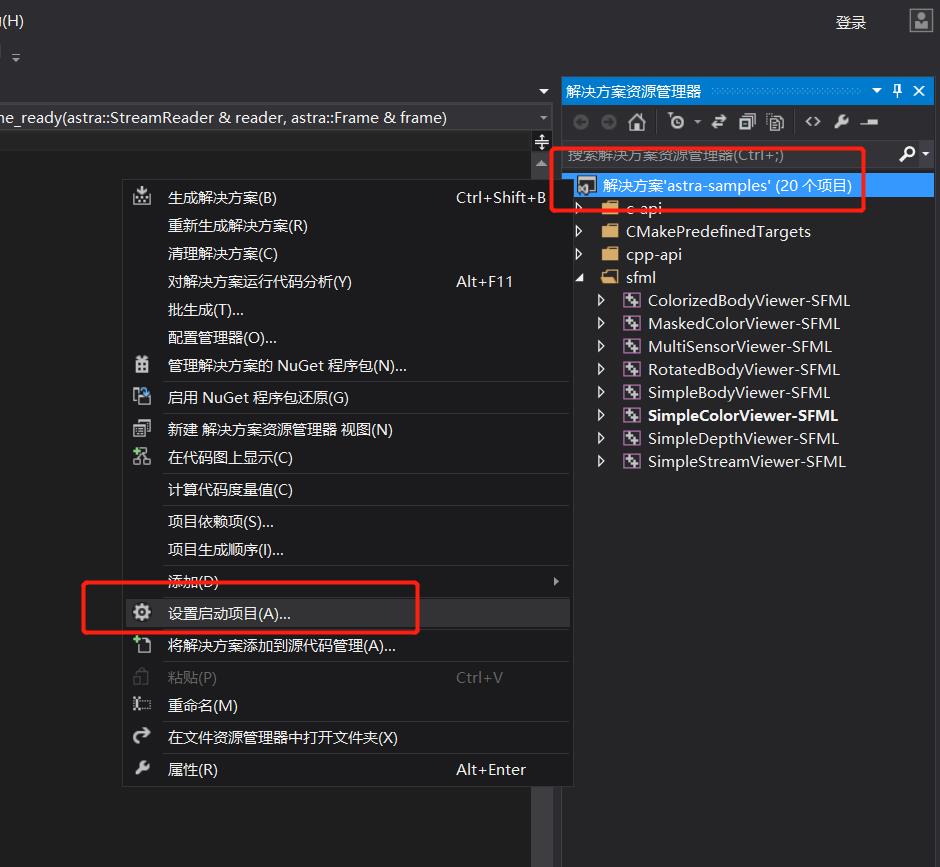
选择一个自己喜欢的项目启动就行
最后,直接debug就行
以上是关于环境搭建 - 奥比中光3D摄像头(Deeyea)的主要内容,如果未能解决你的问题,请参考以下文章
真3D结构光人脸锁成行业潮品,奥比中光合作锁企“霸屏”建博会
linux使用ros打开奥比中光astra相机,查看红外图像
ubuntu18.04 ubuntu20.04 ORB_slam3安装运行测试
在实际机器人上运行rtabmap_ros-rgbd+laser+轮式odom