自动驾驶 4-3 Lesson 3: Dynamic Modeling in 2D
Posted 架构师易筋
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了自动驾驶 4-3 Lesson 3: Dynamic Modeling in 2D相关的知识,希望对你有一定的参考价值。

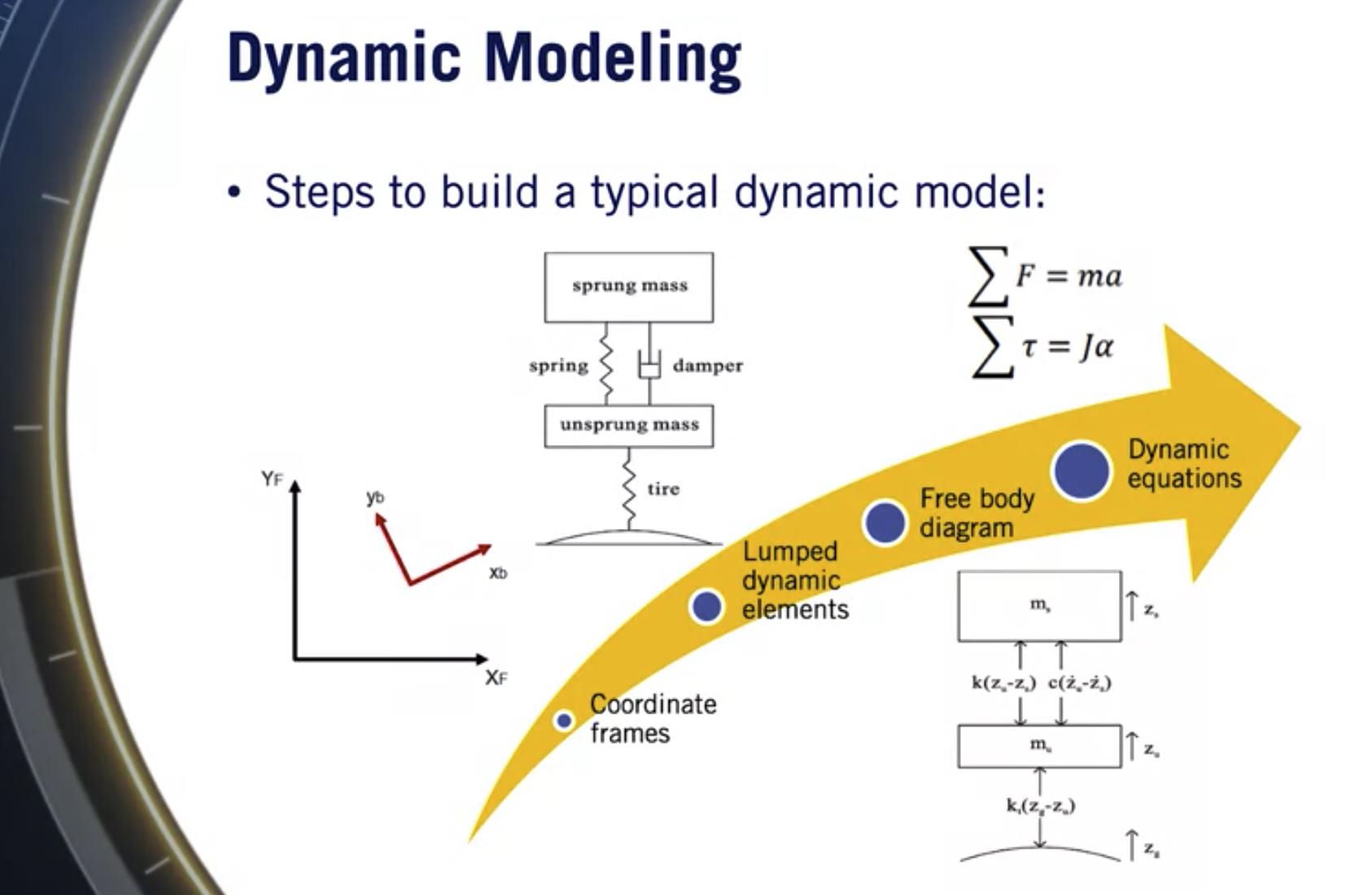
sprung mass: [车辆] 簧上质量
spring: 弹簧
damper: [车辆] 减震器
unsprung mass: 非簧载质量
tire: 轮胎
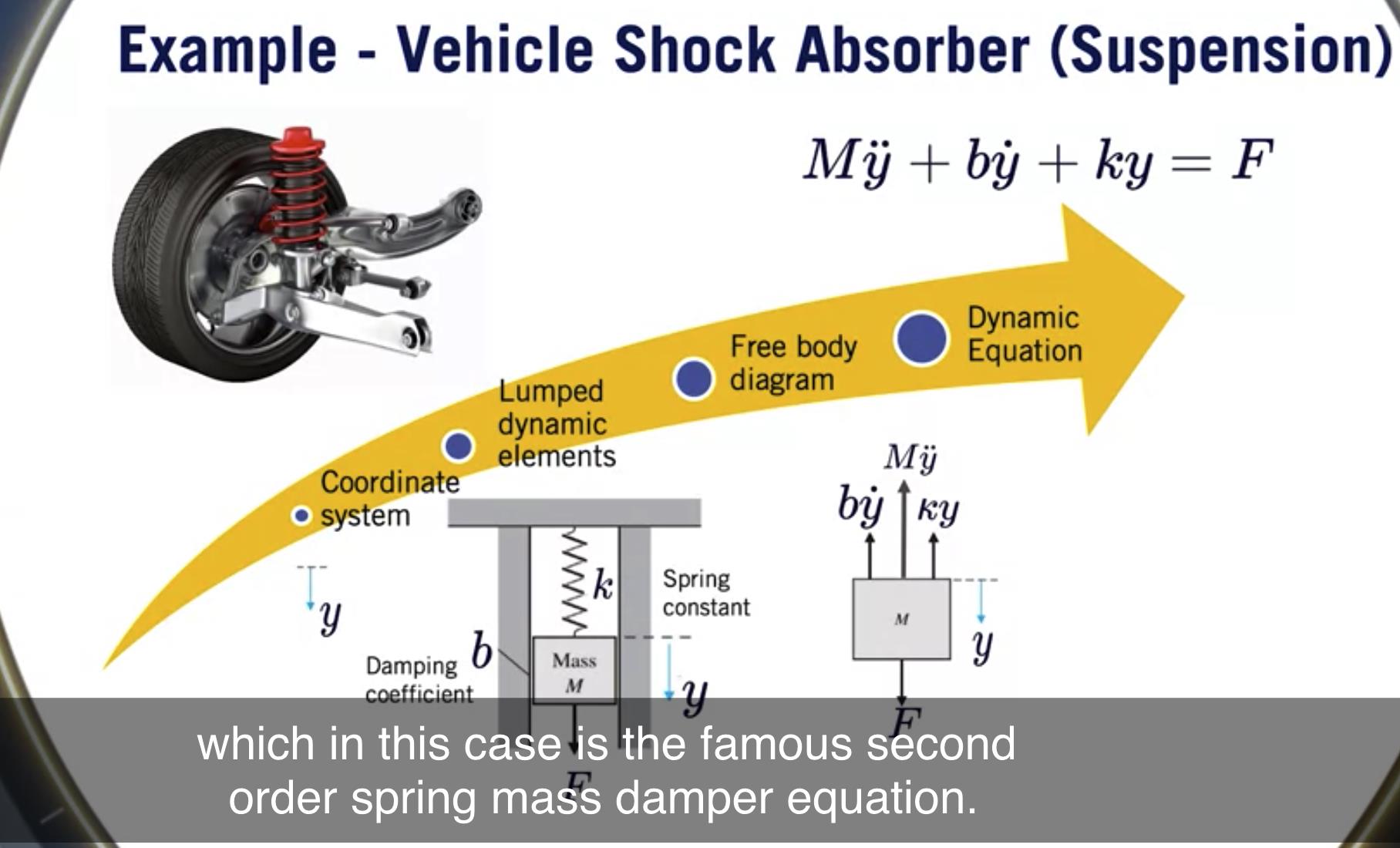
vehicle shock absorber (suspension): 车辆减振器(暂停,中止)
damping coefficient: [物] 阻尼系数
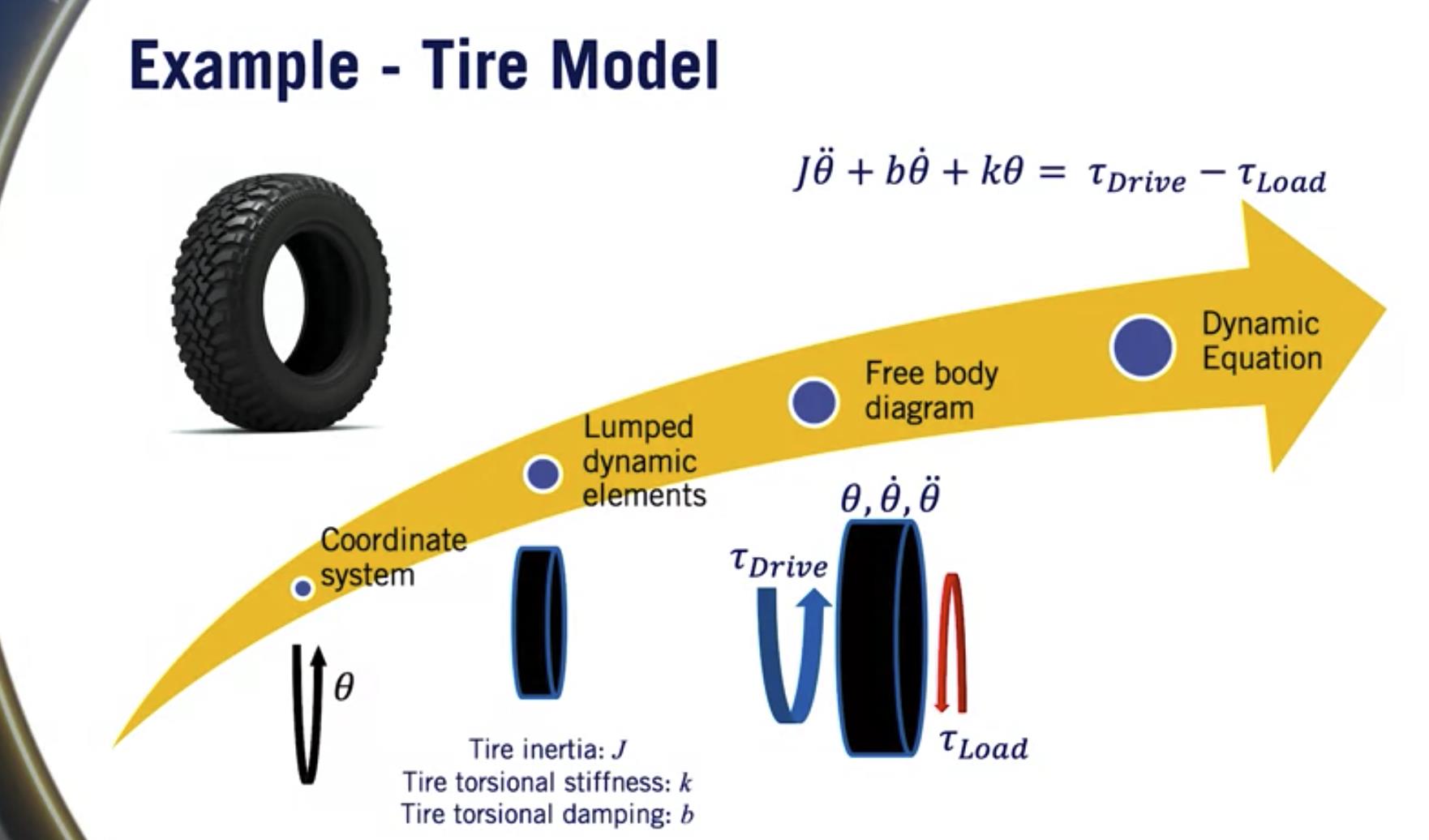
Inertia: 惯性原理
torsional force: 扭转力

Tire inertia: 轮胎惯性
Tire torsional stiffness: 轮胎扭转的刚度
Tire torsional damping: 轮胎扭转的阻尼
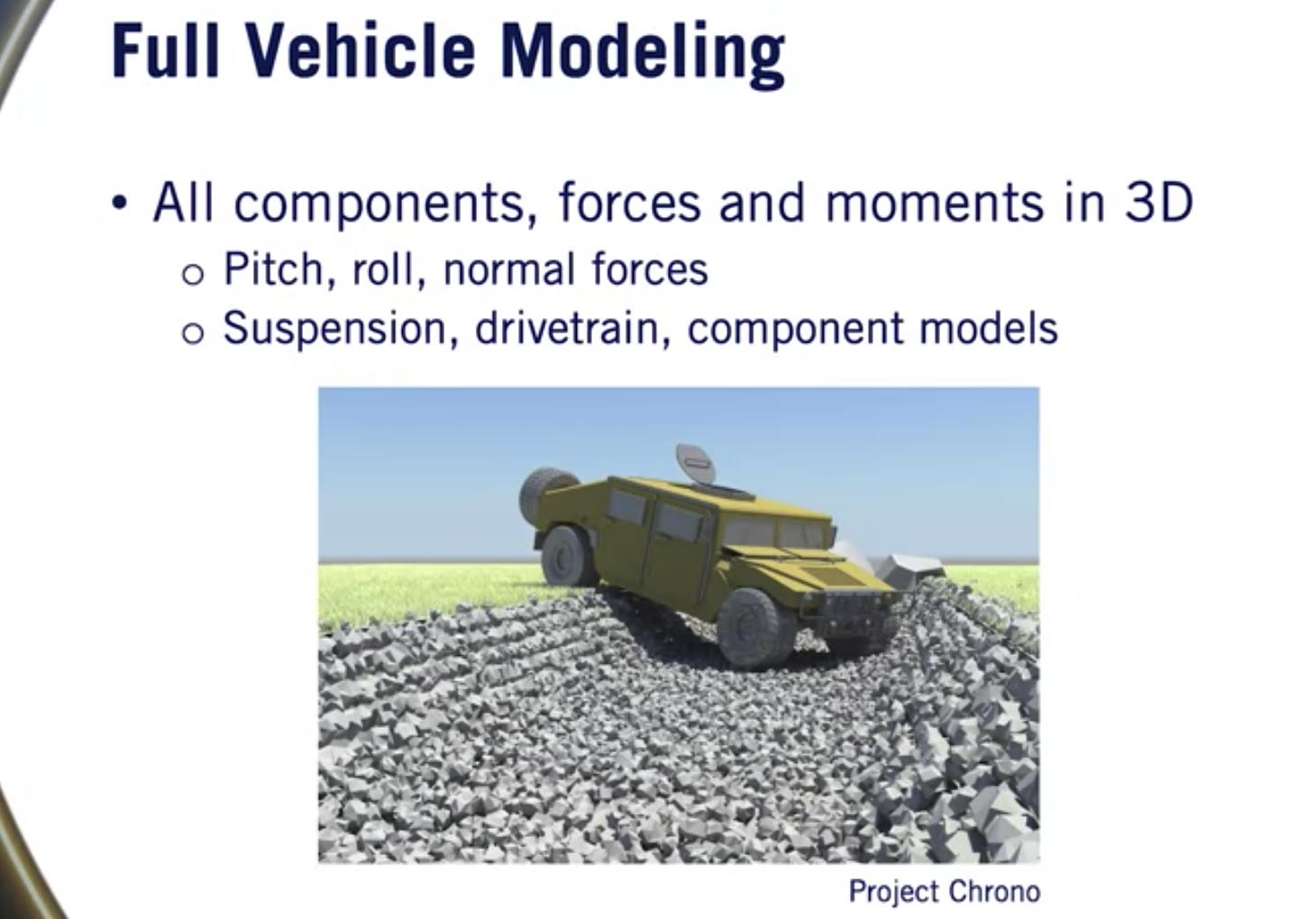
pitch: 倾斜度
roll: 翻滚
suspension: 暂停,中止
drivetrain: 动力传动系统
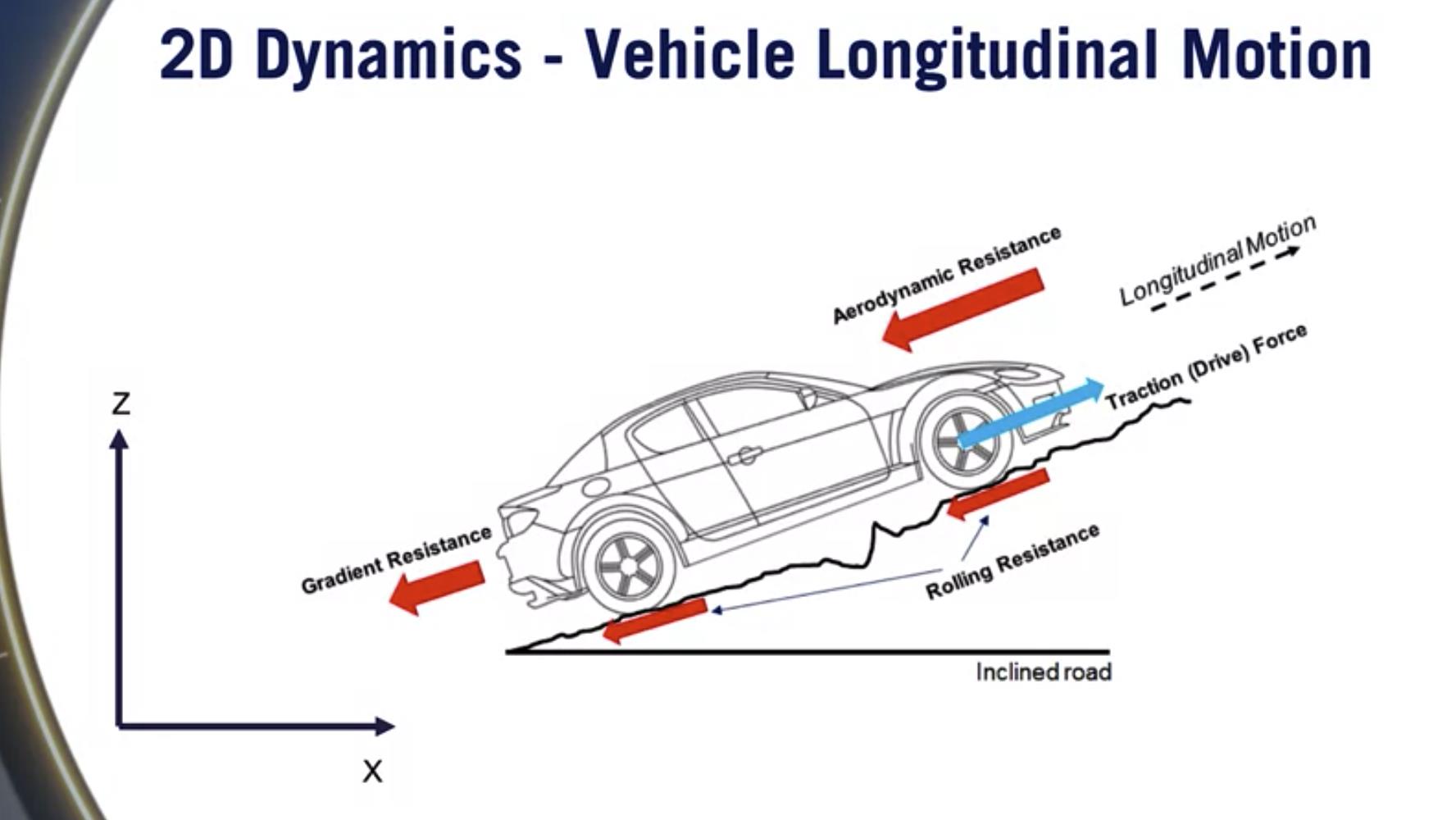
gradient resistance:上坡阻力
aerodynamic resistance:空气动力阻力
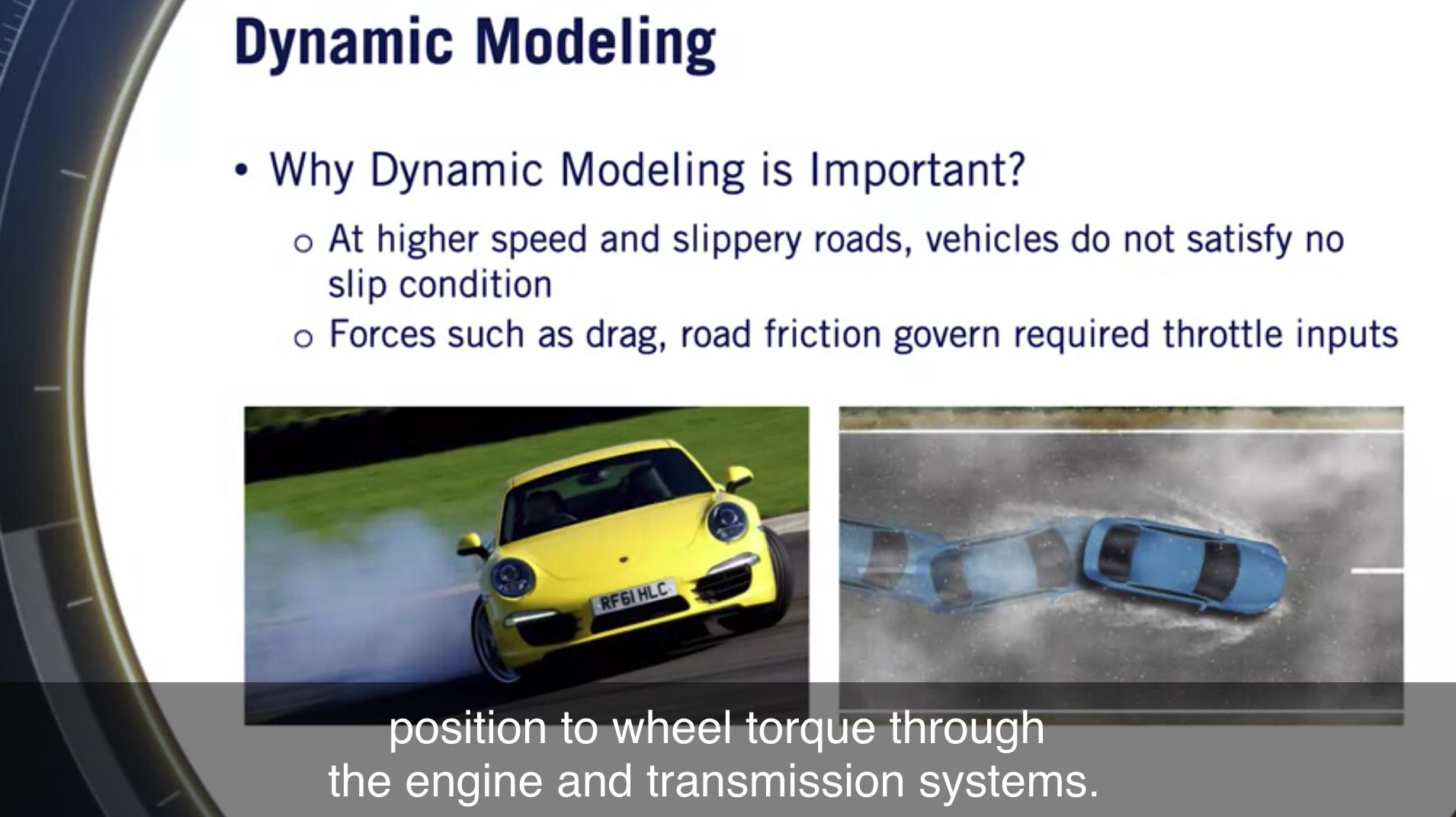
longitudinal motion:纵向运动
traction drive force:牵引力
rolling resistance:滚动阻力
inclined road:斜巷
friction forces:摩擦力
lateral forces:侧向力
Lateral motion:侧向运动

第 3 课补充阅读:3D 中的动态建模
补充阅读:3D 动态建模
在下面的教科书和链接中阅读有关动力学和车辆动力学基础知识的更多信息:
通用动力:
Ardema, Mark D. Newton-Euler Dynamics , Springer: Santa Clara University, Santa Clara (2005)。
车辆建模:
拉贾马尼,拉杰什。车辆动力学和控制, Springer Science & Business Media (2011)。
参考
https://www.coursera.org/learn/intro-self-driving-cars/lecture/yNa0v/lesson-3-dynamic-modeling-in-2d
以上是关于自动驾驶 4-3 Lesson 3: Dynamic Modeling in 2D的主要内容,如果未能解决你的问题,请参考以下文章
自动驾驶 2-3 Lesson 3: Software Architecture
自动驾驶1-6: Lesson 3: Driving Decisions and Actions
自动驾驶3-1: Lesson 1: Safety Assurance for Self-Driving Vehicles
自动驾驶 5-3 Lesson 3: Feedforward Speed Control
原创 自动驾驶3-2 Lesson 2: Industry Methods for Safety Assurance and Testing