PX4官方动态 | AirSim初见面
Posted 阿木实验室
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了PX4官方动态 | AirSim初见面相关的知识,希望对你有一定的参考价值。
在本期,我们将为大家介绍AirSim平台。在近几年AirSim发展迅速,是一款可以在物理和视觉上达到逼真模拟环境的平台。在此平台不仅有很多开源测试环境还模拟了汽车无人机等动力学模型,甚至于对天气、灯光控制也做出了很好的模拟效果,多平台的支持使AirSim有很大的发展前景。所以我们基于AirSim的官方手册,给大家带来一些相关介绍。 
什么是AirSim AirSim 是一个用于无人机、汽车等的模拟器,建立在虚幻引擎上(现在也有一个实验型Unity版本)。它是一个开源的、可跨平台的并支持PX4和Ardupilot进行软件在环仿真的平台;并且,AirSim还支持PX4进行硬件在环仿真,以实现物理和视觉逼真的仿真。
AirSim是作为一个 Unreal 插件开发的,也就是说可以投放到任何一个Unreal环境中。AirSim的目标是将其开发为人工智能研究平台,用于测验机器人的深度学习、计算机视觉和强化学习算法。为此,AirSim还公开API接口,以独立于平台的方式进行检索数据和控制系统。 
下载AirSim几种方式: 由于AirSim支持多平台,在Windows、Linux以及mac系统都可进行下载,可以点击文章末尾官网链接进行下载。
如何使用AirSim AirSim的使用功能非常广泛,官方特意给我们归纳了几种使用AirSim的方式。大家在配置好AirSim之后可以选择感兴趣的方向进行研究。
首先建议带大家先去官网了解关于AirSim各方面的详细文档内容,以对此平台有个全面的了解。 官网:microsoft.github.io/AirSim/
第一种方式:手动驱动 如果您有官方所推荐的RC遥控器(型号:FrSky Taranis X9D Plus,请注意此处遥控器用游戏机XBox 360 USB也是可以的,只不过精度没有RC遥控器高),就可以在模拟器中手动控制无人机。 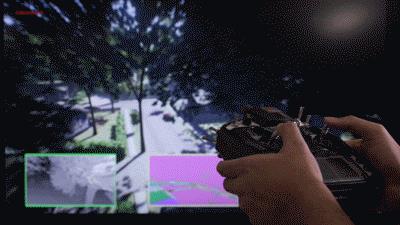
第二种方式:程序控制
由于AirSim公开API,因此用户可以通过编程方式与模拟中的车辆进行交互。简单来说,你可以通过API接口的使用来检索图像、获取状态、控制车辆等。AirSim支持多种编程语言——C++,Python,C#和Java。
注意:AirSim重点关注对于研究和落实的过程,其API端口是可以作为独立的跨平台库进行使用,所以开发者只需要将他们部署在无人机的配套计算机上,就可以在模拟器上编写并测试代码,直接在真实无人机上运行。
第三种方式:收集训练数据第 在AirSim中有两种方式生成用于深度学习的训练数据。最简单的方法是点击右下角的录制按钮,可以为每一帧编写姿势和图像,数据记录代码非常简单,便于开发者对其修改。生成训练数据的方法是访问API,可以完成控制记录数据的方式、内容、地点和时间。
四种方式:计算机视觉模式 另一种使用AirSim的方法是使用“计算机视觉”模式,在这个模式下,可以使用键盘在场景中进行移动,或使用API以任意姿势定位可用相机,并收集深度、视差、表面法线或对象分割等图像。 操作方法:在settings.json文件中修改SimMode设置,更改为“ComputerVision”。 
官方资料 本期PX4更新内容网址:https://microsoft.github.io/AirSim/
- End -
技术发展的日新月异,阿木实验室将紧跟技术的脚步,不断把机器人行业最新的技术和硬件推荐给大家。看到经过我们培训的学员在技术上突飞猛进,是我们培训最大的价值。如果你在机器人行业,就请关注我们的公众号,我们将持续发布机器人行业最有价值的信息和技术。 阿木实验室致力于前沿IT科技的教育和智能装备,让机器人研发更高效!
以上是关于PX4官方动态 | AirSim初见面的主要内容,如果未能解决你的问题,请参考以下文章