ROS+opencv实践-cv_bridge的使用
Posted 殇堼
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了ROS+opencv实践-cv_bridge的使用相关的知识,希望对你有一定的参考价值。
ROS与opencv之间进行图像转换和处理的过程:
1.首先,订阅摄像头话题(image_raw),读取视频流。
2.使用cv_bridge,将ROS图像格式转化为opencv格式。
3.使用opencv里面的API对图像进行处理。
4.使用cv_bridge,将opencv图像格式转化为ROS格式。
cv_bridge是在ROS图像消息和OpenCV图像之间进行转换的一个功能包。
解决图像传输卡顿的问题
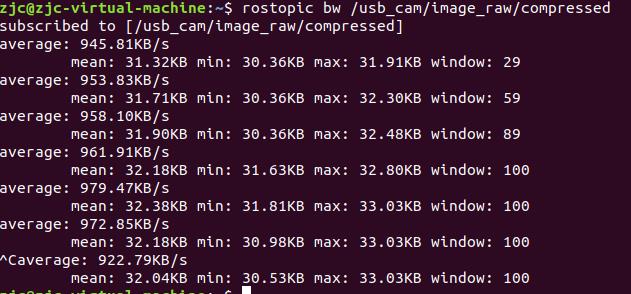
使用rqt_image_view订阅图像话题时,选用image_raw/compress会比image_raw/流畅很多,原因是前者是对图像经过压缩后的显示的。
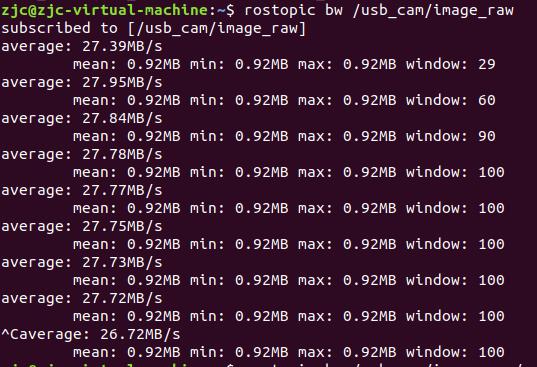
占用宽带越小,流畅度越高,因此可通过查看话题所用宽带验证:
查看话题宽带
格式:rostopic bw /话题
查看图像话题带宽
rostopic bw /image_row
references:
ROS学习笔记–cv_bridge
以上是关于ROS+opencv实践-cv_bridge的使用的主要内容,如果未能解决你的问题,请参考以下文章
CV_Bridge | Image的ROS数据类型与opencv数据类型之间的转换