Ros发布图像消息
Posted 想游泳的鱼
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了Ros发布图像消息相关的知识,希望对你有一定的参考价值。
ros的图像消息的格式为
sensor_msgs::ImagePtr
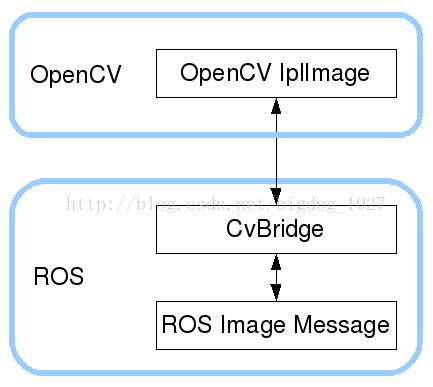
一般发送图像消息都是通过opencv来进行转换,ros提供了一个类cv_bridge来负责ros图像消息和opencv图像消息的转换
在OpenCV中,图像是以Mat矩阵的形式存储的,这与ROS定义的图像消息的格式有一定的区别,所以需要利用cv_bridge将这两种不相同的格式联系起来,如下图所示。
转换后的图像消息格式为
sensor_msgs::ImagePtr
opencv和cv_bridge转换的核心代码
cv::Mat img = imread("imagepath", IMREAD_COLOR);
sensor_msgs::ImagePtr msg = cv_bridge::CvImage(std_msgs::Header(), "bgr8", img).toImageMsg();
但在转换后的消息还不能直接用平时直接定义的node发出去,要使用image_transport进行转换,才能发出去
ros::NodeHandle nh;
image_transport::ImageTransport it(nh);
//topic name is /camera_front/image_color,the publish message queue size is 1.
image_transport::Publisher pub = it.advertise("/camera_front/image_color", 1);
pub.publish(msg);
但是image_transport同时还发布了其它的topic用来兼容image_view的功能,就是说上面的代码自动帮助发布了有压缩格式的视频流:
/camera/image
/camera/image/compressed
/camera/image/compressed/parameter_descriptions
/camera/image/compressed/parameter_updates
/camera/image/compressedDepth
/camera/image/compressedDepth/parameter_descriptions
/camera/image/compressedDepth/parameter_updates
/camera/image/theora
/camera/image/theora/parameter_descriptions
/camera/image/theora/parameter_updates
配置CmakeList.txt文件
主要是要添加opencv的支持
find_package(OpenCV REQUIRED)
include_directories(
$catkin_INCLUDE_DIRS
$OpenCV_INCLUDE_DIRS
)
target_link_libraries(node $catkin_LIBRARIES $OpenCV_LIBS )
以上是关于Ros发布图像消息的主要内容,如果未能解决你的问题,请参考以下文章