OpenCV中的特征匹配+单应性以查找对象
Posted 程序媛一枚~
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了OpenCV中的特征匹配+单应性以查找对象相关的知识,希望对你有一定的参考价值。
这篇博客将混合calib3d模块中的特征匹配和单应性,在复杂图像中查找已知对象。
1. 效果图
特征匹配 & 单应性查找对象效果图如下:
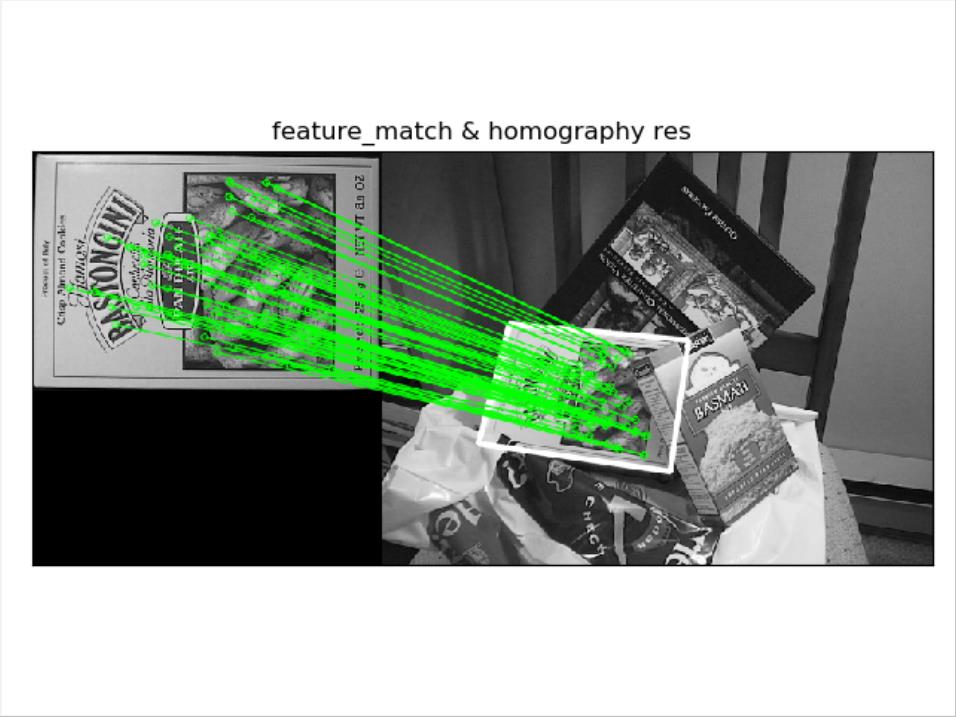
2. 源码
# 在图像中找到SIFT特征并应用比率测试来找到最佳匹配。
import cv2
import numpy as np
from matplotlib import pyplot as plt
MIN_MATCH_COUNT = 10
img1 = cv2.imread('images/box.png', 0) # 查询图像
img2 = cv2.imread('images/box_in_scene.png', 0) # 训练图像
# 初始化SIFT检测器
sift = cv2.xfeatures2d.SIFT_create()
# 使用SIFT检测器寻找关键点和描述符
kp1, des1 = sift.detectAndCompute(img1, None)
kp2, des2 = sift.detectAndCompute(img2, None)
FLANN_INDEX_KDTREE = 0
index_params = dict(algorithm=FLANN_INDEX_KDTREE, trees=5)
search_params = dict(checks=50)
flann = cv2.FlannBasedMatcher(index_params, search_params)
matches = flann.knnMatch(des1, des2, k=2)
# 根据Lowe比率测试存储所有良好匹配项
good = []
for m, n in matches:
if m.distance < 0.7 * n.distance:
good.append(m)
if len(good) > MIN_MATCH_COUNT:
src_pts = np.float32([kp1[m.queryIdx].pt for m in good]).reshape(-1, 1, 2)
dst_pts = np.float32([kp2[m.trainIdx].pt for m in good]).reshape(-1, 1, 2)
M, mask = cv2.findHomography(src_pts, dst_pts, cv2.RANSAC, 5.0)
matchesMask = mask.ravel().tolist()
h, w = img1.shape
pts = np.float32([[0, 0], [0, h - 1], [w - 1, h - 1], [w - 1, 0]]).reshape(-1, 1, 2)
dst = cv2.perspectiveTransform(pts, M)
img2 = cv2.polylines(img2, [np.int32(dst)], True, 255, 3, cv2.LINE_AA)
else:
print("Not enough matches are found - %d/%d" % (len(good), MIN_MATCH_COUNT))
matchesMask = None
# 匹配点绘制为绿色,只绘制内置点
draw_params = dict(matchColor=(0, 255, 0), # 绘制匹配点为绿色
singlePointColor=None,
matchesMask=matchesMask, # 只绘制内置点
flags=2)
img3 = cv2.drawMatches(img1, kp1, img2, kp2, good, None, **draw_params)
plt.imshow(img3, 'gray')
plt.xticks([])
plt.yticks([])
plt.title("feature_match & homography res")
plt.show()
参考
以上是关于OpenCV中的特征匹配+单应性以查找对象的主要内容,如果未能解决你的问题,请参考以下文章
opencv cv2.findHomography sift、surf特征匹配 单应性矩阵理解
OpenCV-Python实战(12)——一文详解AR增强现实
OpenCV中的「透视变换 / 投影变换 / 单应性」—cv.warpPerspectivecv.findHomography