PX4官方动态 | ROS2最新版本Galactic现已支持PX4
Posted 阿木实验室
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了PX4官方动态 | ROS2最新版本Galactic现已支持PX4相关的知识,希望对你有一定的参考价值。
近期Open Robotics发布了第七版ROS2:Galactic Geochelone版本。此版本是ROS2长期支持(LTS)版本之间的临时版本,一直支持到2022年11月,Galactic Geochelone是第二个针对Ubuntu20.04的ROS2版本。而且现在ROS2:Galactic Geochelone版本已全面支持PX4。详情可以参考PX4官方文档说明: https://docs.px4.io/master/en/ros/ros2.html?utm_content=171960200&utm_medium=social&utm_source=twitter&hss_channel=tw-721094774
此次的ROS2版本更新,除了更新了许多新功能外,还解决了很多ROS用户社区所反馈的问题,大家可以在Galactic发布的界面中找到此次版本更新的全部功能列表。  有关自Foxy版本以来的所有更改,可以参照完整的更新日志: https://docs.ros.org/en/galactic/Releases/Galactic-Geochelone-Complete-Changelog.html
有关自Foxy版本以来的所有更改,可以参照完整的更新日志: https://docs.ros.org/en/galactic/Releases/Galactic-Geochelone-Complete-Changelog.html
ROS的“乌龟帮”
从2009年初推出的ROS0.4公众测试版本(Mango Tango),往后一直到ROS 0.11的测试版本都是用果汁进行命名的,比如5月推出Mojito Mambo,六月推出Watermelon Chill,1月推出Berry Blast。现在ROS的每一个版本是按着英文字母顺序,取字母表中对应的字母依次命名。
从E版本开始,ROS的命名就开始借鉴了Ubuntu的命名方法,用一个形容词加一种乌龟名来命名,比如E版本是Electric Emys(电动+泽龟)来表示的。为了起名字,柳树车库在后面还成立了ROS起名委员会,在征得大家意见后,每个版本发行后,就开始制定下一期的版本更新名字。每个版本都会有不同的含有乌龟的LOGO,比如现在最新推出的是Galactic Geochelone版本,其LOGO是在银河系中,卡通乌龟乘载着龟壳形状的飞船的。下表是一直以来每次版本的更新详情。 
阿木有话说:
ROS和PX4作为两个用户群体极大的社区,两者既有相互独立性又有相关性,现在每次更新版本能适用PX4,这也是两大社区联动的体现。从开源无人机发展来看,无人机爱好者或专业开发人员普遍都是ROS社区和PX4社区的成员,所以两者的共同发展肯定会大力促进开源无人机生态的发展模式。而ROS和PX4平台的相互独立性的发展也会促进各自的未来应用发展。PX4和ROS的关系可以用下图进行解释: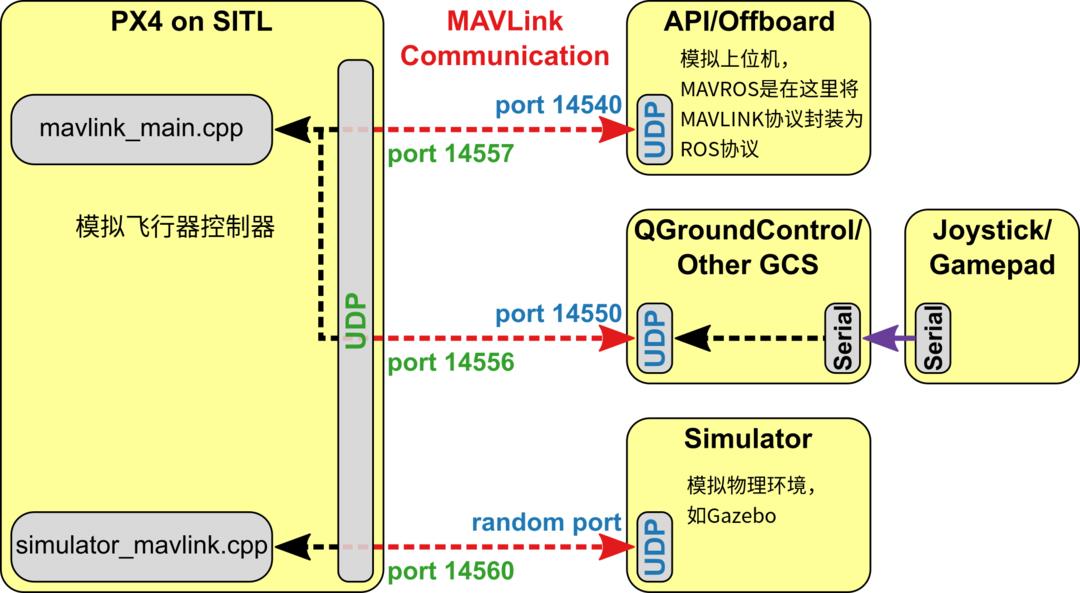
参考文献:
ROS1和ROS2的命名内容参照古月居老师的文章,详情可参照: https://www.guyuehome.com/805
ROS1和ROS2的相关介绍可参照PX4官方动态的第二期内容: https://mp.weixin.qq.com/s?__biz=MzIwNzgxNzg0Mg==&mid=2247502383&idx=2&sn=079f42d046c511181ad7ae36e5a960d1&chksm=970e1732a0799e242fe3184cff7f007c40177f8813a9c571de988aa5412246c37da6a0daaa08&scene=178&cur_album_id=1923591312188981249#rd
图片来自本文为CSDN博主「手可摘星辰不敢高声语」的原创文章,原文链接: https://blog.csdn.net/weixin_44917390/article/details/106427395
- End -
技术发展的日新月异,阿木实验室将紧跟技术的脚步,不断把机器人行业最新的技术和硬件推荐给大家。看到经过我们培训的学员在技术上突飞猛进,是我们培训最大的价值。如果你在机器人行业,就请关注我们的公众号,我们将持续发布机器人行业最有价值的信息和技术。 阿木实验室致力于前沿IT科技的教育和智能装备,让机器人研发更高效!
以上是关于PX4官方动态 | ROS2最新版本Galactic现已支持PX4的主要内容,如果未能解决你的问题,请参考以下文章
PX4官方动态 | 最新 PIXHAWK FMUV6U 开放标准
PX4官方动态 | Prometheus开源项目已被收录于PX4官方用户指南