PX4官方动态 | Prometheus开源项目已被收录于PX4官方用户指南
Posted 阿木实验室
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了PX4官方动态 | Prometheus开源项目已被收录于PX4官方用户指南相关的知识,希望对你有一定的参考价值。
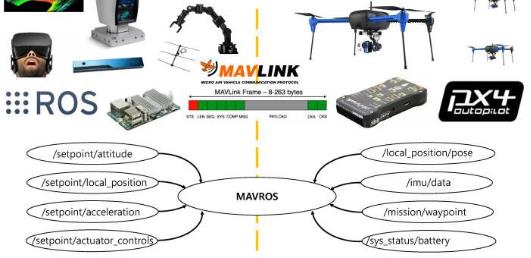
Prometheus是由阿木实验室的维护的自主无人机开源项目,旨在为无人机的智能化与自主飞行提供全套解决方案。其中,Prometheus的控制部分是一套基于PX4开源固件与Mavros协议的模块,由阿木实验室最早的无人机开源项目PX4_Command优化而来。它可以通过ROS对PX4飞控发送控制指令,完成无人机的外环控制,是P系列无人机指点飞行、避障和目标追踪等一系列功能的基础。
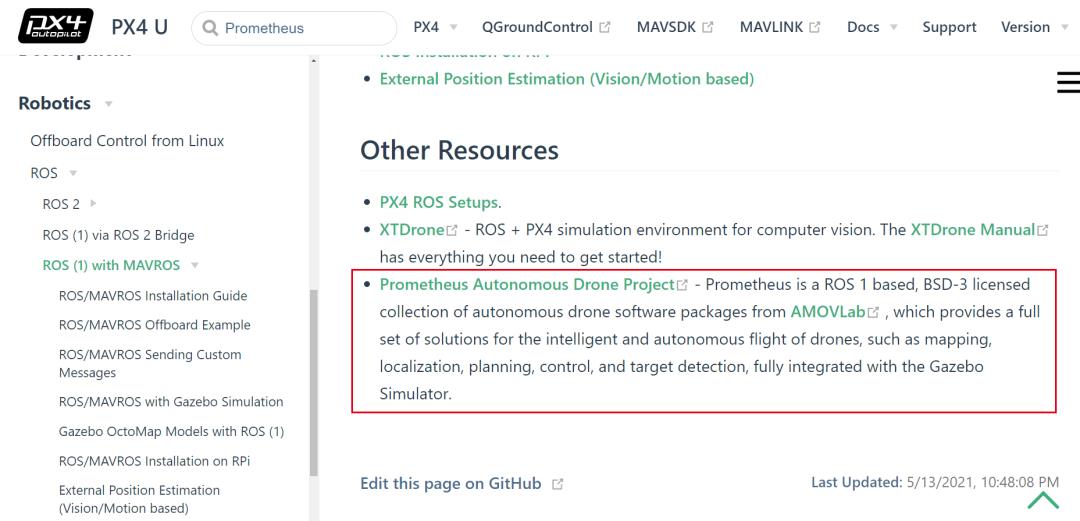

在5月13日的更新中,PX4官方将Prometheus自主无人机项目收录到了PX4用户指南中,以指引更多智能机器人开发者使用这套无人机软件开发平台。ROS作为开源机器人的开发工具已在许多领域证明了其强大的功能;而PX4作为开源无人机领域的金字招牌,也被广泛应用于智能无人机的研发。在MavROS协议更新后,PX4+ROS成为了大多数智能无人机的标准架构。
作为智能机器人科研领域最常用的开发工具之一,ROS已经孵化出了许多知名的开源项目,例如YOLO、Cartgrapher…甚至我们熟悉的PX4也是基于部分ROS框架的,ROS已被广泛应用于智能机器人的自主决策、SLAM和任务规划等功能的开发。在早些年,这些功能主要由无人车实现,近年来智能机器人的研发热点则逐渐转移到了旋翼无人机上。然而,无人机的开发难度要比无人车高出许多,大部分研发者们都缺少一个成熟的平台帮助大家搭建自己的智能无人机平台。
Prometheus正是这样一个项目,它集成了PX4开源飞控固件与ROS开发环境,可为开发者提供成熟可用的机载电脑端开发程序,实现更加简洁快速的开发体验。在将多个开源ROS项目整合到统一的开发环境下后,可直接实现SLAM建图、视觉定位、自主规划、位置控制及目标检测等功能与相应的Gazebo仿真。

本次PX4将Prometheus项目纳入到用户指南手册中,既是对阿木实验室的技术的认可,也是一次绝佳的布道宣讲。在智能无人机领域,阿木实验室凭借Prometheus项目获得许多粉丝的认可。但开源项目的壮大离不开社区成员的共同参与和慷慨贡献,阿木实验室希望在这此后,能吸引更多采用PX4+ROS的研发者,在Prometheus系统上做出更加酷炫的东西。
PX4 用户指南“机器人技术”页面:
https://docs.px4.io/master/en/ros/ros1.html
PX4 项目组对“将Prometheus加入到用户手册”的讨论话题:
https://github.com/PX4/PX4-user_guide/pull/1249
- End -
以上是关于PX4官方动态 | Prometheus开源项目已被收录于PX4官方用户指南的主要内容,如果未能解决你的问题,请参考以下文章
PX4官方动态 | Prometheus项目组将作为演讲者参加PX4-2021开发者峰会