计算两幅图像之间的单应矩阵
Posted KAVEI
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了计算两幅图像之间的单应矩阵相关的知识,希望对你有一定的参考价值。
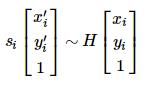
单应矩阵
是指在特殊情况下(纯旋转或平面目标),投影矩阵为3x3的矩阵
单应矩阵格式
应用:图像校正 视角变换 图像拼接 增强现实
找到单应矩阵的函数:
Mat cv::findHomography ( InputArray srcPoints, InputArray dstPoints, int method = 0, double ransacReprojThreshold = 3, OutputArray mask = noArray(), const int maxIters = 2000, const double confidence = 0.995 )
)
参数详解:
srcPoints 源平面中点的坐标矩阵,可以是CV_32FC2类型,也可以是vector<Point2f>类型
dstPoints 目标平面中点的坐标矩阵,可以是CV_32FC2类型,也可以是vector<Point2f>类型
method 计算单应矩阵所使用的方法。不同的方法对应不同的参数,具体如下:
0 - 利用所有点的常规方法
RANSAC - RANSAC-基于RANSAC的鲁棒算法
LMEDS - 最小中值鲁棒算法
RHO - PROSAC-基于PROSAC的鲁棒算法
ransacReprojThreshold
将点对视为内点的最大允许重投影错误阈值(仅用于RANSAC和RHO方法)。如果
则点被认为是个外点(即错误匹配点对)。若srcPoints和dstPoints是以像素为单位的,则该参数通常设置在1到10的范围内。
mask
可选输出掩码矩阵,通常由鲁棒算法(RANSAC或LMEDS)设置。 请注意,输入掩码矩阵是不需要设置的。
maxIters RANSAC算法的最大迭代次数,默认值为2000。
confidence 可信度值,取值范围为0到1.
重载形式:
Mat cv::findHomography ( InputArray srcPoints, InputArray dstPoints, OutputArray mask, int method = 0, double ransacReprojThreshold = 3 )
以上是关于计算两幅图像之间的单应矩阵的主要内容,如果未能解决你的问题,请参考以下文章