ROS 2 I Name Brainstorming 命名头脑风暴(ROS1/2版本与它的吉祥物小乌龟们)
Posted zhangrelay
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了ROS 2 I Name Brainstorming 命名头脑风暴(ROS1/2版本与它的吉祥物小乌龟们)相关的知识,希望对你有一定的参考价值。
The release date for ROS 2 Humble Hawksbill is now less than a month away. As we traditionally announce the name of the following distribution when a new distribution is released, it’s time to begin brainstorming (namestorming?) the name for the ROS 2 I-Turtle release.
Here are the existing ROS 2 names and code names.
现在距离 ROS 2 Humble Hawksbill 的发布日期还有不到一个月的时间。 正如传统上在发布新发行版时宣布以下发行版的名称一样,是时候开始头脑风暴(命名风暴?)ROS 2 I-Turtle 发行版的名称了。
以下是现有的 ROS 2 名称和代号。
rolling
- Ardent Apalone - ardent

- Bouncy Bolson - bouncy

- Crystal Clemmys - crystal

- Dashing Diademata - dashing

- Eloquent Elusor - eloquent

- Foxy Fitzroy - foxy

- Galactic Geochelone - galactic

- Humble Hawksbill - humble ???
And here are the ROS 1 names and code names.
这是 ROS 1 的名称和代号。



- Boxturtle - boxturtle

- C Turtle - cturtle
- Diamondback - diamondback

- Electric Emys - electric

- Fuerte - fuerte

- Groovy Galapagos - groovy

- Hydro Medusa - hydro
- Indigo Igloo - indigo
- Jade Turtle - jade

- Kinetic Kame - kinetic

- Lunar Loggerhead - lunar

- Melodic Morenia - melodic

- Noetic Ninjemys - noetic

To get your namestorming going, here are some useful lists.
A list of adjectives that start with I 2
Turtle species starting with I 2
Turtle genera
Prehistoric turtle genera
For reference, here is the namestorming thread for ROS 1 Indigo Igloo 1.
Please share your suggestions and comments. There are no rules to this process so be creative!
为了让名字风暴继续进行,这里有一些有用的列表。
以 I 2 开头的形容词列表
以 I 2 开头的龟种
龟属
史前龟属
作为参考,这里是 ROS 1 Indigo Igloo 1 的命名风暴线程。请分享建议和意见。 这个过程没有规则,所以要有创意!
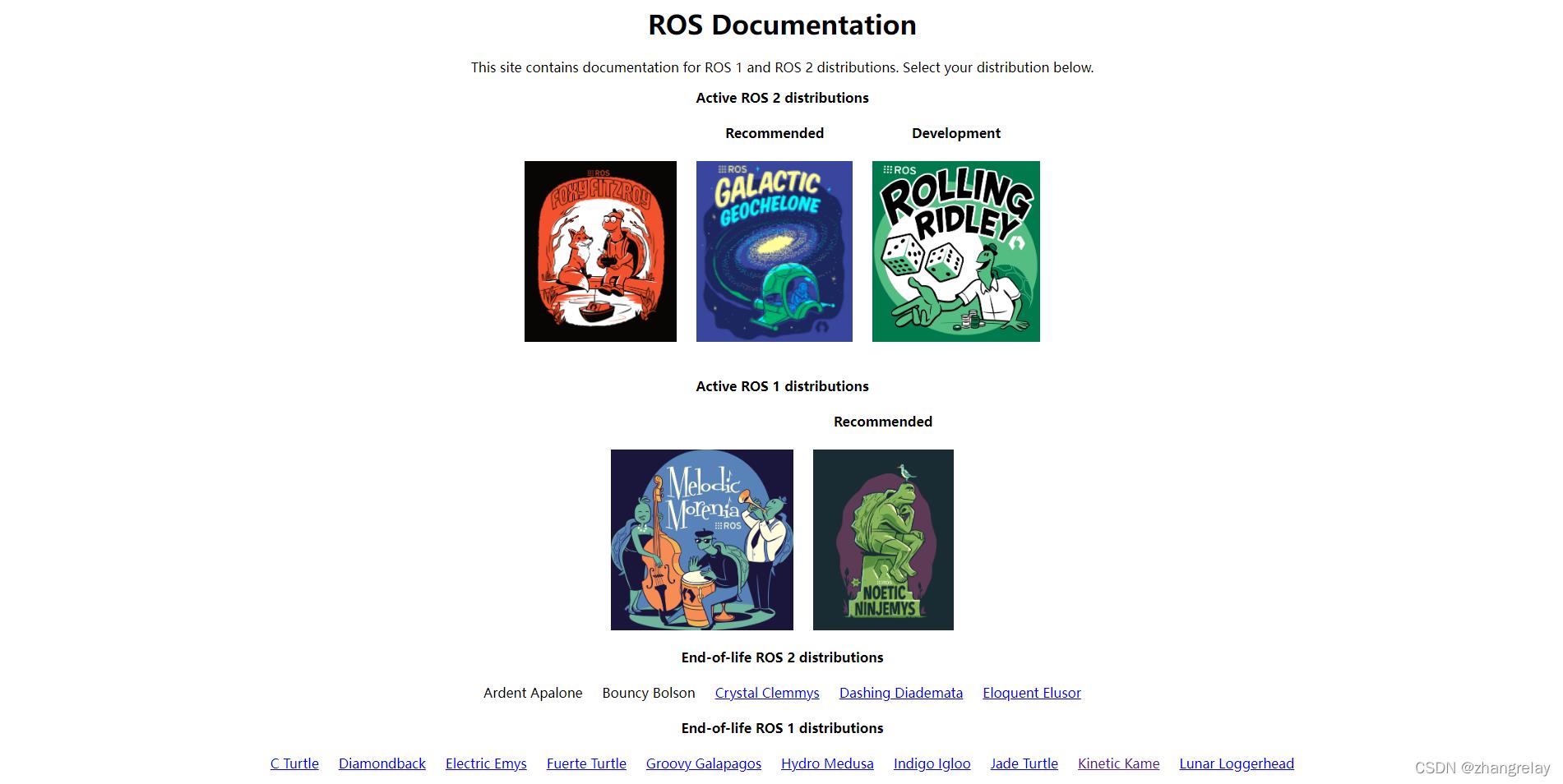
docs.ros.org
ROS文档全家福(2022/04/26 Humble Hawksbill - humble 即将发布)
以上是关于ROS 2 I Name Brainstorming 命名头脑风暴(ROS1/2版本与它的吉祥物小乌龟们)的主要内容,如果未能解决你的问题,请参考以下文章