UnityAPI.Quaternion四元数
Posted
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了UnityAPI.Quaternion四元数相关的知识,希望对你有一定的参考价值。
参考技术A Quaternion类Quaternion类又称四元数,由x, y, z, w 4个分量组成,属于struct类型。
Unity中用其存储和表示对象的旋转角度
Quaternion的变换较为复杂,对于GameObject一般的旋转及移动,可用Transform中相关方法实现
A、Quaternion类实例属性
1、eulerAngles
public Vector3 eulerAngless get; set;
返回或设置Quaternion实例对应的欧拉角
对应GameObject对象的Transform进行欧拉角的变换次序是,先绕Z轴旋转相应角度,再绕X、Y轴旋转相应角度,不同的旋转次序得到的最终最终状态是不同的
对GameObject对象的旋转角进行赋值的方式通常有两种,一种是将Quaternion实例赋值给transform的rotation,第二种是将三维向量代表的欧拉角直接赋值给transform的eulerAngles
//rotations.eulerAngles=new Vector3(0.0f, speed*Time.time, 0.0f);
//A.rotation=rotations;
//eulerAngle=new Vector3(0.0f, speed*Time.time, 0.0f);
//B.eulerAngles=eulerAngle;
B、Quaternion类实例方法
1、SetFromToRotation
public void SetFromToRotation(Vector3 fromDirection, Vector3 toDirection);
创建一个从fromDirection到toDirection的rotation
Quaternion q1=Quaternion.identity;
q1.SetFromToRotation(v1,v2);
transform.rotation=q1;
相当于将GameObject对象进行如下变换,将GameObject对象自身坐标系的x,y,z轴方向和世界坐标系的x,y,z轴方向一致,然后将GameObject对象自身坐标系中向量v1指向的方向旋转到v2方向
不可直接使用transform.rotation.SetFromToRotation(v1,v2)方式进行设置,只能将实例化的Quaternion赋值给transfrom.rotation
2、SetLookRotation
public void SetLookRotation(Vector3 view);
Public void SetLookRotation(Vector3 view, Vector3 up);
对一个Quaternion实例的朝向进行设置
同样不能直接赋值,需要首先实例化一个Quaternion,然后调用方法后,赋值给transfrom.rotation
transform.forward方向与v1方向相同
transform.right垂直于由Vector3.zero, v1和v2三点构成的平面
v2用来决定transform.up的朝向,选取方式使得transform.up的方向和v2方向的夹角小于或等于90度
v1为Vector3.zero时,方法失效
3、ToAngleAxis
public void ToAngleAxis(out float angle, out Vector3 axis);
angle为旋转角,axis为轴向量
将Quaternion实例转换为角轴表示,即要将GameObject对象的rotation从Quaternion.Identity状态变换到当前状态,只需将GameObject对象绕着axis的轴向(指世界坐标系中)旋转angle角度即可。
此方法通常和静态方法AngleAxis(float angle, Vector3 axis)联合使用,使得一个物体的rotation始终和另一个物体的rotation保持一致
C、Quaternion类静态方法
1、Angle
public static float Angle(Quaternion a, Quaternion b);
用于返回从参数a到参数b变换的夹角,即GameObject对象从状态a转换到状态b时需要旋转的最小夹角
2、Dot
public static float Dot(Quaternion a, Quaternion b);
求参数a, b的点乘
q1=(x1,y1,z1,w1)
q2=(x2,y2,z2,w2)
float f=Quaternion.Dot(q1,q2)
f=x1*x2+y1*y2+z1*z2+w1*w2,f的范围为[-1,1]
当f=1时,他们的rotation相等
当f=-1时,其中一个rotation比另一个多旋转乐360度
3、Euler
public static Quaternion Euler(Vector3 euler);
public static Quaternion Euler(float x, float y, float z);
此方法用于返回欧拉角Vector3(x,y,z)对应的四元数Quaternion实例
四元数(qx,qy,qz,qw)与欧拉角(ex,ey,ez)的对应关系:
ex=ex*PIover180/2.0f;
ey=ey*PIover180/2.0f;
ez=ez*PIlover180/2.0f;
qx=sin(ex)cos(ey)cos(ez)+cos(ex)sin(ey)sin(ez);
qy=cos(ex)sin(ey)cos(ez)-sin(ex)cos(ey)sin(ez);
qz=cos(ex)cos(ey)sin(ez)-sin(ex)sin(ey)cos(ez);
qw=cos(ex)cos(ey)cos(ez)+sin(ex)sin(ey)sin(ez);
4、FromToRotation
public static Quaternion FromToRotation(Vector3 fromDirection, Vector3 toDirection);
用来创建一个从参数fromDirection到toDirection的Quaternion变换
功能和实例方法SetFromToRotation相同,只是用法上有些不同
5、Inverse
public static Quaternion Inverse(Quaternion rotation);
用于返回参数rotation的逆向Quaternion值
例如实例rotation=(x,y,z,w)
Inverse(rotatiom)=(-x, -y, -z, w)
效果上,rotation.eulerAngles=(a, b, c)
transform.rotation=Inverse(rotation)相当于transform依次绕自身坐标系的z轴、x轴、y轴分别旋转-c度,-a度和-b度
但由于时局部坐标系内的变换,最后transform的欧拉角的各个分量值并不一定等于-a,-b,-c
6、Lerp
public static Quaternion Lerp(Quaternion from, Quaternion to, float t);
用于返回从参数from到to的线性插值
当t<=0,返回from,当参数t>=1,返回to。执行速度比slerp方法快,一般可代替Slerp方法
7、LookRotation
public static Quaternion LookRotation(Vector3 forward);
public static Quaternion LookRotation(Vector3 forward, Vector3 upwards);
forward为返回Quaternion的forward朝向
用于返回一个Quaternion实例,使GameObject对象的z轴朝向参数forward方向
与方法SetLookRotation功能相同,只是用法上有些不同
8、RotateTowards
public static Quaternion RotateTowards(Quaternion from, Quaternion to, float maxDegreesDelta);
from为起始,to为结束,参数maxDegreesDelta为每帧最大角度值
用于返回从参数from到参数to的插值,且返回值的最大角度不超过maxDegreesDelta
功能与Slerp相似,只是maxDegreesDelta指角度值,而不是插值系数,<0时,将沿to到from方向插值计算
9、Slerp
public static Quaternion Slerp(Quaternion from, Quaternion to, float t);
用于返回从参数from到to的球面插值
参数t<=0时返回值为from,参数t>=1时返回值为to,一般情况下可用Lerp方法代替
四元数运动学笔记旋转的雅克比矩阵
1.相对于旋转向量的雅克比
- 这里在全局系下利用左扰动进行推导:

2.相对于四元数的雅克比
2.1相关公式
- 三叉积公式:

- 纯实部的四元数和四元数相乘,这里是实数
- 两个纯虚四元数相乘:
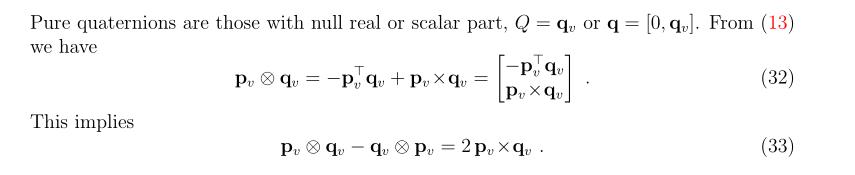
2.2推导雅克比
由以上三个公式可以得到以下公式的推导,其中这里的在涉及到四元数相乘的情况时,都是四元数的表示形式(纯实部四元数和纯虚部四元数),其他情况下则是正常的标量和三维向量。

旋转过程相对于四元数的雅克比

以上是关于UnityAPI.Quaternion四元数的主要内容,如果未能解决你的问题,请参考以下文章