基于Unity的移动端点云显示及路径规划
Posted Demon_zzj
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了基于Unity的移动端点云显示及路径规划相关的知识,希望对你有一定的参考价值。
基于Unity的移动端点云显示及路径规划
使用Unity开发的显示点云及通过点云地图生成可通行区域并使用A*算法进行路径规划移动端应用程序。
项目地址:https://github.com/ZhouZijie-BIT/Unity-PointCloud-Navigation

1. 点云显示
1.1 点云格式
点云显示使用了pcx插件,可以在编辑器阶段导入ply格式的点云地图,pcx插件即可在导入文件时将ply格式转化成为Unity中可以显示的相应格式。
1.2 手势操作
在点云显示场景支持4种基本的手势操作:平移、缩放、单轴旋转、多轴旋转。通过该场景中的按钮可以控制4种基本手势操作输入。
2. 路径规划
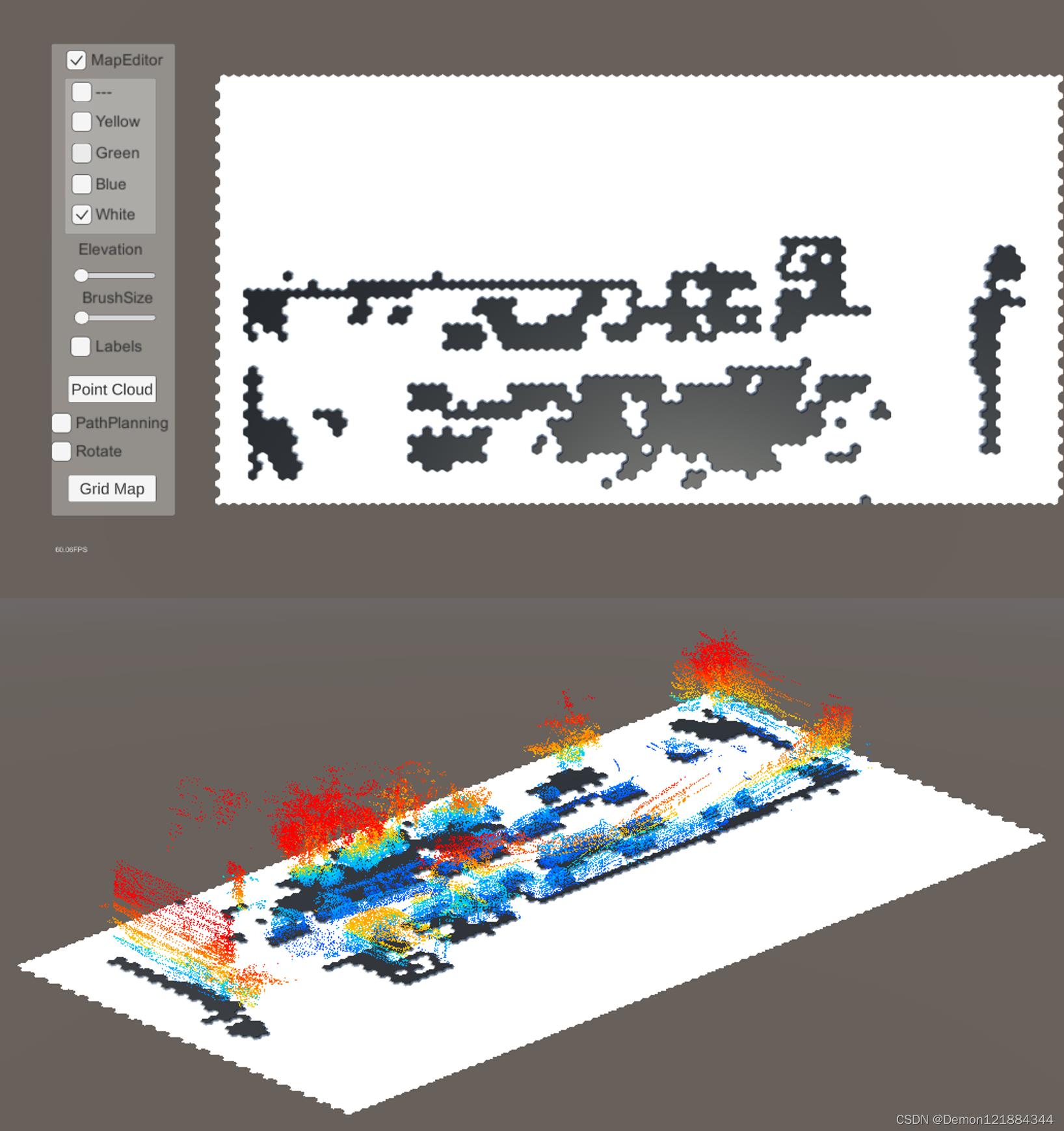
2.1 栅格地图系统
地图系统采用了Catlike Coding教程中的六边形地图系统设计,并作了一定改变。
2.2 可通行区域提取
通过将点云向栅格地图投影,对每个格子投影得到的点云数量进行统计,超过一定阈值则认为该栅格是不可通行的。
2.3 路径规划与路径提取
使用A*算法进行路径规划。在搜索得到了通路之后,根据梯度双线性插值的方法提取路径点,最终可视化输出。

路径规划基于D*算法的移动机器人路径规划(Matlab代码实现)
以上是关于基于Unity的移动端点云显示及路径规划的主要内容,如果未能解决你的问题,请参考以下文章