自动驾驶要到Level 5,还有多少难关要过?
Posted 雅斯顿
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了自动驾驶要到Level 5,还有多少难关要过?相关的知识,希望对你有一定的参考价值。
(本文首发于知乎)
许多人可能会认为自动驾驶会脱胎于半自动驾驶,也就是说按照如今市面上的驾驶辅助功能逐渐升级迭代以达到最终的无人驾驶状态,但很遗憾的是自动驾驶和半自动驾驶之间存在一条难以逾越的鸿沟。

说到底,目前的半自动驾驶依靠的是「不违规」的思路,即车轮触碰到车道标线(或者模拟车道标线)并不断的修正。于是,这种半自动驾驶在软件层面是没有数据收集能力的,只是利用简单的「如果…则…」的软件代码实现。

但自动驾驶需要实现全路况的覆盖,它要具备思考能力,应对不守规矩的车子,可能突然窜出来的行人以及我们一直以来对自动驾驶设置的那道道德问题--「如果必然发生事故,一个老人和两个孩子,自动驾驶如何选择?」
这种思考的质变影响了许多方面。比如,半自动驾驶由人和车相互辅助,紧急状况下,人可以主动介入,避免事故的发生。不过,这有点一厢情愿的意思。

自动驾驶不会脱胎于半自动驾驶,它不会让驾驶员注意力分散时突然要求驾驶员集中,如果让驾驶员一直集中,那也就没有自动驾驶的必要,所以自动驾驶必然得是一个全新的事物。
如果要车辆在驾驶方面实现高于人类的最终效果,汽车就需要学会思考,在大量的经验数据面前,借助AI的人工智能不断收集数据,智能的推出更好的解决方案,于是自动驾驶其实分为了两个部分:
1、汽车的底层控制系统,即一堆机械硬件的组合,实现最基础的加速、刹车等功能;
2、汽车的上层控制系统,即对路面、导航、天气的智能分析,计算出最正确的命令。
这个最正确的命令就得依靠更为精准的数据,其中最重要的就是高精度地图,甚至可以说高精度地图是无人驾驶发展过程中最不可或缺的一环,其因果关系恰如人类,一个陌生的环境和一个熟悉的环境,对于人类这种高级生物的判断时间有着显而易见的影响。
过去,无人驾驶通过GPS确定位置,但GPS却始终无法消除坐标与真实距离之间的误差,这种误差直接导致无人驾驶汽车在处理一些细节时缺乏数据支撑,因此工程师开始通过其他方式弥补GPS数据的低精度问题。
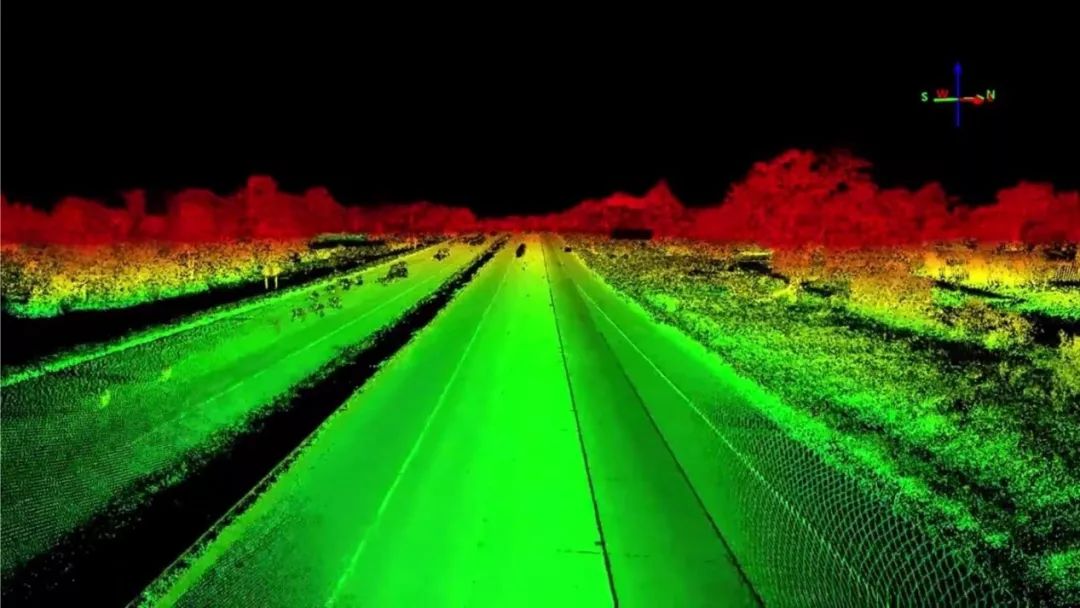
高精度地图不同于传统地图,高精度地图不光可以反映大型地理特征,比如高山湖泊,也能反映树木、人行横道等微观地形细节。应用于无人驾驶领域的高精度地图更是可以标注出车道线、道路施工标志、路口交叉点等静态数据。
拥有了高精度地图之后,车辆需要思考的判断依据还需要依赖V2V、V2X以及激光雷达、雷达、数码相机等数据收集装置。
《无人驾驶》一书中,作者详细阐述了这些阻碍自动驾驶落地的硬件,但这些硬件还不是最主要的,可能某些设备在数据采集量上还不足以达到我们的要求,但至少能看到未来。真正困难的是培养一个会自我进化学习的大脑,它处理的每一次事故都可以作为案例上传到云端,以便下次遇到类似状况时做出正确的判断,所以最困难的是极其多样的样本。
如何收集样本?
人类其实是要求自动驾驶「绝对安全」的,尽管人类自身都做不到。
根据国家安全监管总局、交通运输部数据统计,2016年中国共接报道路交通事故864.3万起,同比增加65.9万起,上升16.5%。其中,涉及人员伤亡的道路交通事故212846起,造成63093人死亡、226430人受伤,直接财产损失12.1亿元。道路交通事故万车死亡率为2.14,同比上升2.9%。
如果无人驾驶可以让这些数据降低一半,无人驾驶相比较当下是进步的还是依然不合格的?其实无人驾驶是不断进化的,它的模型建设得当,其发生的事故数量会越来越低,因为事故的样本越来越多,只不过,人类亲自去贡献这部分数据,代价太大。

我们看到了许许多多的案例,比如通用、福特、本田、丰田在密歇根建立了一个M-City,这个自动驾驶试验场地就像是一个独立的王国,许许多多的自动驾驶模型在这里进行测试,但建造这样的场地显然不能只依靠一家车企,一家车企肯定拿不出这么多预算。
当然,密歇根需要有自动驾驶场地,美国的其他不同气候特征的地方也要有,澳大利亚为代表的南方也要有,俄罗斯为代表的极寒也要有,中国最复杂的路况也需要建造,这样的成本显然无比巨大,而每一辆搭载所有传感器的汽车也都价格不菲。
况且,自动驾驶需要循序不断的测试。行业普遍预测,为了保证自动驾驶技术安全可靠,车企需要110亿英里的测试数据来优化其自动驾驶系统。假设100辆自动驾驶汽车,每天24小时不停歇路测,平均时速25英里(40公里)每小时,需要500多年的时间才能完成目标里程。
庞大的测试里程以及越来越多的测试车辆都让车企的利润报表,不那么好看。为此,我们需要仿真模拟系统;正如过去为了验证汽车安全,我们需要假人;为了解决车辆碰撞安全的成本问题,我们需要可以99%的还原车辆真实碰撞产生的形变的CAE仿真模拟系统一样。

大概是许多企业看到了这方面的发展前景,比如英伟达已经将AutoSIM虚拟环境用于测试其在CES上展示的自动驾驶汽车,并将其与Drive Pegasus AI车载计算机相结合,创建了一个虚拟测试和验证环路。
微软也推出了AirSim开源项目,用于测试人工智能系统的安全性,该系统提供仿真的环境、车辆动力和感知能力,促进无人驾驶技术的发展
有许多报告研究指出,未来中国在自动驾驶方面会领先于全球,因为中国有最复杂的地形、最多样的驾车环境以及目前发展最快的5G网络,这种先天条件其实有助于中国科技公司做出最好的自动驾驶。

以腾讯(主要对腾讯了解较多)为代表的科技公司已经开始在自动驾驶方面布局,腾讯很早就入股了四维图新,这是一家高精度地图公司,其次腾讯也着手启动TAD(Tecent Autonomos Driving),其中TAD Sim就是这样一个具备代表性的模拟系统。

这个模拟系统可以通过高精度地图、大数据、AI和云技术,实时建模出完全与使用环境一致的虚拟世界。目前,我了解到的是它们通过建模虚拟出了深圳市,同时关联了深圳的气象变化,这个东西说白了有点像大表姐主演的《饥饿游戏》。
有一个幕后,想让虚拟世界出现什么天气、状况、交通、事故都可以控制。
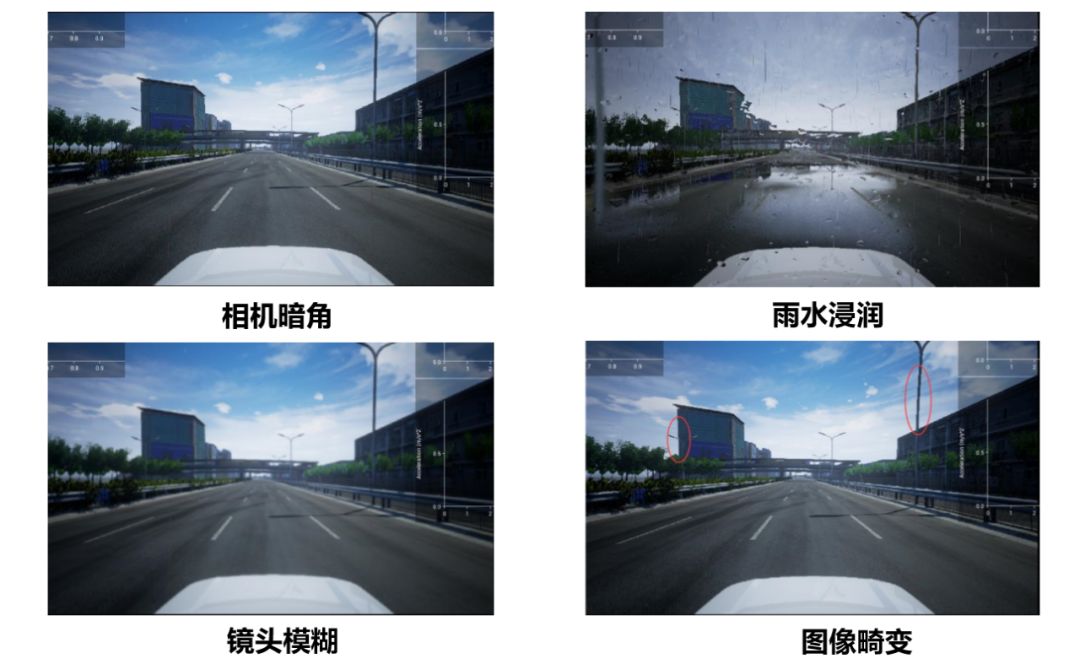
在这个世界里,开发自动驾驶车型需要的传感器设备都可以找到,比如摄像头、激光雷达、IMU、毫米波雷达,而且也会实时模拟气象环境对传感器的影响,比如大雾会降低雷达穿透,摄像头依然会和现实中一样出现畸变,雨天会降低驾驶者视角和传感器敏感程度。

打造了这个系统之后,车企就可以在这个系统中进行自动驾驶的开发,而运用虚拟系统开发的优势在于它可以大幅缩减验证周期时长,比如在仿真平台上,每天有1000台自动驾驶的汽车同时上路,一天下来就可以完成70万公里的测试。而且每台车的背后可能都是一个车企或者一个单位。一台车遇到事故,其他车都会受到影响,可能会引发一连串需要决策反应的情况,触发多条故事线。
数据收集能力相比较常规数据收集快了几个数量级,短时间之内就可以完成普通一辆车几十年的数据,这些快速累积的数据就可以加速自动驾驶或者无人驾驶的落地。
其实不难判断,未来能将自动驾驶落地或者做出突破技术的一定是腾讯、阿里、百度这种巨头公司,因为只有这种公司才有那么多协同资源整合,而小公司只是掌握一方面数据,很难融会贯通。
比如腾讯,入股四维图新,有了高精度地图,拥有腾讯云有了各种各样的大数据和智能技术,而打造这么一个虚拟世界,也是基于腾讯在游戏领域的开花,其游戏引擎方面应该是当下国内独树一帜的。
游戏技术可能是未来衡量虚拟世界真实与否的关键,说白了,虚拟系统就是一个《饥饿游戏》和《头号玩家》,系统之间事件的关联需要计算,道路的修建、天气的模拟、稳定的运行以及真实与否都是需要核心技术,让虚拟系统更加贴近现实的核心技术。
取材于游戏,运用于虚拟系统的开发,腾讯要比百度和阿里更有优势一些。这是我个人的观点。
所以自动开发的难点是什么,不是硬件,而是软件、智能软件,而智能软件的背后就是数据,数据的爆发,我认为会来自模拟系统。模拟系统会让自动驾驶数据成指数级增长,同时加速自动驾驶的落地。
另一方面,我认为也特别有意义的是,这种模拟系统可以让许多不是特别大,没有资金积累的小公司加入,依靠更独特的创意和专业的技术,成为未来一批新的龙头公司。
图 | 来源于网络
雅斯顿 更多精彩内容,点击进入小程序 Mini Program
About Astoncar
爱车,更多一点
以消费者的目光探讨汽车,分享更多原创真实的汽车观点
Contact us
gao@astoncar.com
以上是关于自动驾驶要到Level 5,还有多少难关要过?的主要内容,如果未能解决你的问题,请参考以下文章
为何自动驾驶需要5G?
为什么自动驾驶需要5G?
自动驾驶技术基本知识介绍
中国距离自动驾驶还有多远?
中国离全自动驾驶还有多远?
外观帅,空间大,还有“自动驾驶”,这辆SUV只卖10多万!