托盘插孔定位图像识别
Posted 人工智能感知信息处理算法研究院
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了托盘插孔定位图像识别相关的知识,希望对你有一定的参考价值。
1. 背景介绍
随着中国经济的快速发展,传统依靠人力的企业搬运环节开始由机械化向自动化、智能化转型,工厂内部物流、仓储物流对柔性化程度较高的自动化搬运设备的需求增长迅速。而叉车作为物流搬运设备中的主力军,逐渐开始向智能识别、自主导航定位等先进的技术靠拢,智能叉车就是在此背景下进行研究与设计。其主要研究内容如下:对传统叉车的机械结构进行了分析与研究。采用底盘为单舵轮的五轮结构进行改造,转向机构通过后期自行创新设计,采用转向电机—传动轮—皮带—从动轮—转向轴承相组合的方式。对运动状态下车体受到的阻力进行了分析,得出在不同货物重量条件下车体受到的阻力和所需要的输出动力。对智能叉车的硬件总体控制系统进行设计。主控设备选用以codesys底层开发的伊诺威科控制器,协控设备选用倍福EtherCAT端子模块,两者共同构成智能叉车的控制单元。硬件电路的设计包括:驱动电路、货物移载电路和多传感器融合的电路。信号采集端子采用倍福EL1809、EL2809和EL4102端子模块。为了实现智能叉车的柔性控制,设计了相关的智能控制算法。在物流仓库中,叉车按照地磁导航进行巡线导航,当叉车移动到物料前面的时候,开启相机进行采集,识别物品堆放的层数以及托盘中心孔的位置,从而计算与插孔的上下左右距离偏差,启动PLC控制插孔到中心位置,进行装箱到叉车上。
2. 开发环境
Microsoft Visual Studio 2013 C++.
OPENCV 2.4.9
3. 视觉定位算法结果
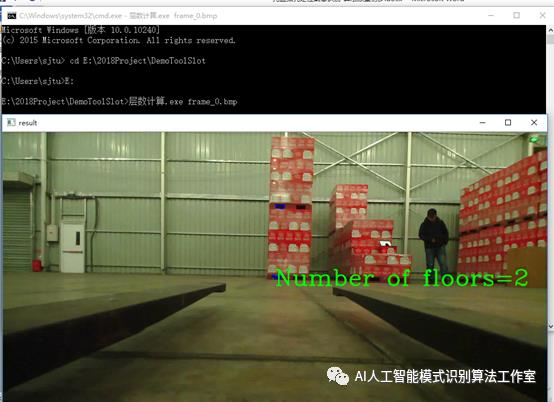
3.1 进货到后直行,需要层数
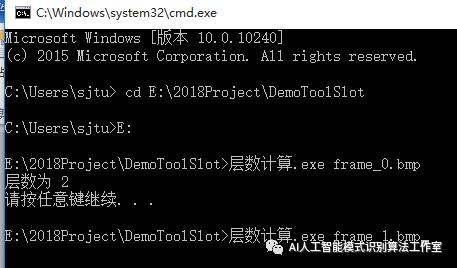
3.1.1 按住键盘上面的Win+R键打开cmd黑屏窗口
3.1.2 切换到程序目录下面,使用 “cd E:2018ProjectDemoToolSlot”

3. 1.3 运行层数计算程序,“层数计算.exe frame_0.bmp”,回车
3. 1.4 运行层数计算程序,“层数计算.exe frame_1.bmp”,回车

3.2. 叉齿偏差计算
3. 2.1 叉齿偏差计算程序,“偏差计算.exe frame_56.bmp”,回车
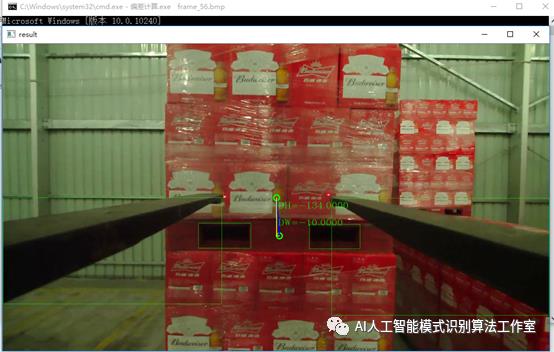
3.2.2叉齿偏差计算程序,“偏差计算.exe frame_57.bmp”,回车
以上是关于托盘插孔定位图像识别的主要内容,如果未能解决你的问题,请参考以下文章
PyAutoGUI 定位命令返回错误的图像识别坐标
图像识别入门6 车牌定位方法
项目推荐多数据源图像识别与目标定位
数字图像处理--车牌识别
图像识别基于模板匹配车牌识别matlab源码含GUI
创新研发 | 基于图像识别与北斗定位的停车调研创新