高速高精度半导体运动台设计
Posted 深圳信迈科技DSP+ARM+FPGA
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了高速高精度半导体运动台设计相关的知识,希望对你有一定的参考价值。
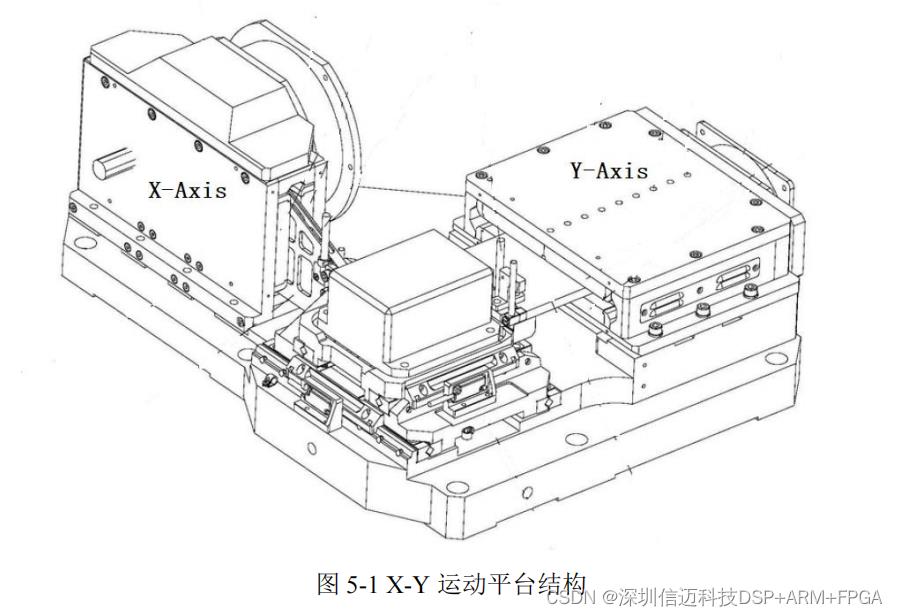
不管是晶圆制造设备如光刻机、刻蚀机等,还是半导体后端封装设备,如固晶机、焊线机等,XY 运动平台都是这些设备的核心部件,运动平台的性能决定着设备的性能。
高速高精运动平台,其最大特点就是高速度、高加速度和高精度。高速度、高加速度可以提高设备的生产效率,高精度则对产品的质量有很大影响。在不同的应用领域中,可分为高定位精度和高跟随精度。比如在高端数控加工中,对轮廓误差要求高,此时注重的是高跟随精度;在半导体封装设备中,是点到点的运动,此时注重的是高定位精度。 目前,在封装设备中的高速高精度运动平台的的技术水平能达到 1m/s 的速度,20g 的加速度以及 1um 的定位精度 。 驱动方式的发展现状 传统的 XY 运动平台是基于交流伺服电机和滚珠丝杆搭建起来的,通过滚珠丝杆将伺服电机的旋转运动转化为运动平台的直线运动,具体结构如图 1-2 所示。 随着电机技术和驱动技术的发展,
XY
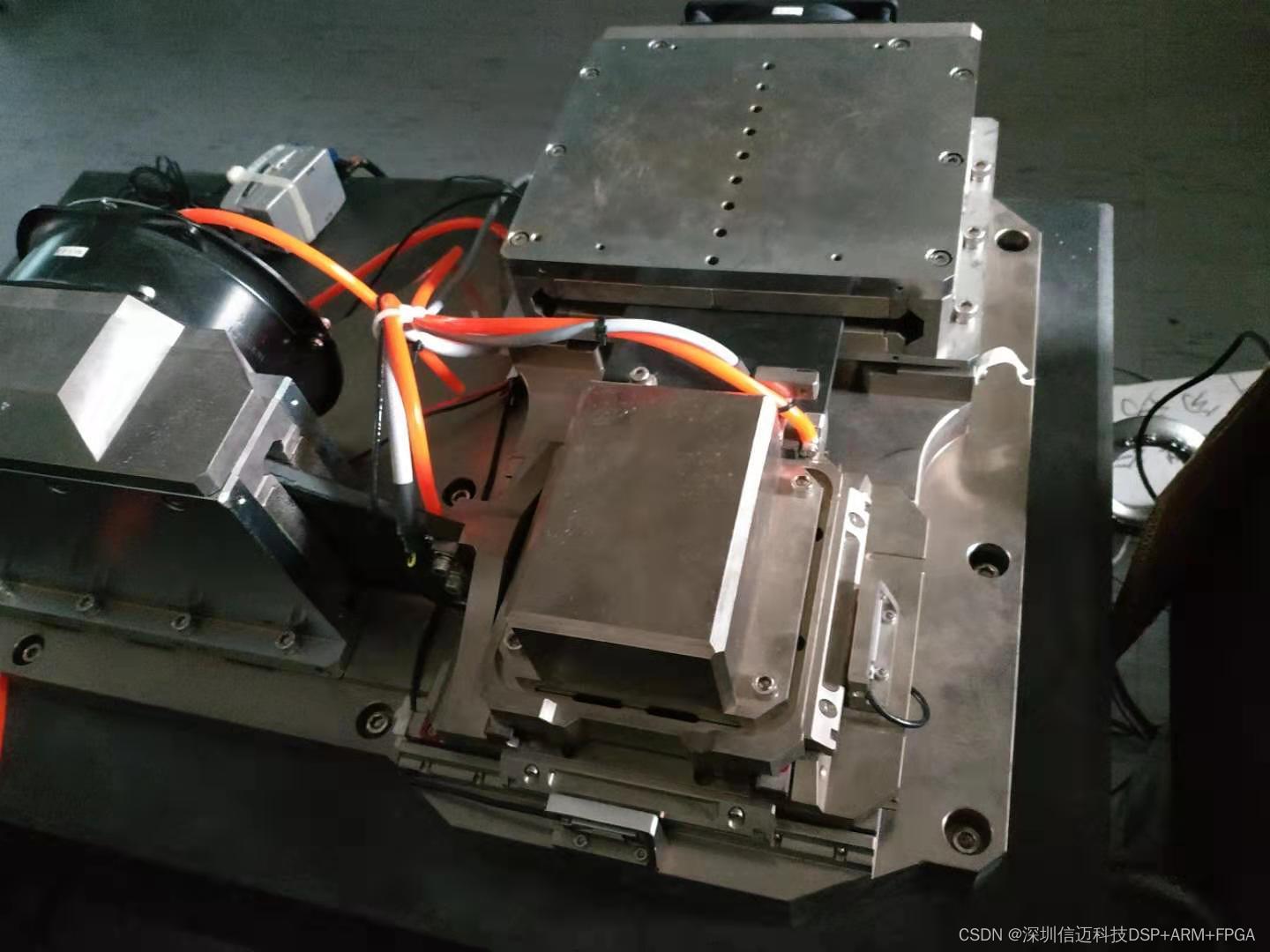
运动平台常采用直线电机直接驱动的方式,其结构如图 1-3
所示。直线电机是通过电能直接产生推动力,无需机械传动环节,无摩擦阻力且无传动间隙,具有结构简单、刚度大、响应快、调速范围宽等优点。使用直线电机的 XY
运动平台,相比较传统的滚珠丝杆驱动方式的
XY
运动平台能够达到更大的响应速度和更小的定位精度。因此在高速高精度的运动平台上,直线电机逐渐取代了旋转电机,采用直线电机一方面结构简单、稳定可靠,另一方面能够达到较快的运动速度和较高的定位精度和重复定位精度,大大地提升了运动平台的性能。
随着电机技术和驱动技术的发展,
XY
运动平台常采用直线电机直接驱动的方式,其结构如图 1-3
所示。直线电机是通过电能直接产生推动力,无需机械传动环节,无摩擦阻力且无传动间隙,具有结构简单、刚度大、响应快、调速范围宽等优点。使用直线电机的 XY
运动平台,相比较传统的滚珠丝杆驱动方式的
XY
运动平台能够达到更大的响应速度和更小的定位精度。因此在高速高精度的运动平台上,直线电机逐渐取代了旋转电机,采用直线电机一方面结构简单、稳定可靠,另一方面能够达到较快的运动速度和较高的定位精度和重复定位精度,大大地提升了运动平台的性能。
 直线电机直接驱动方式
伺服系统简介
伺服系统是工业自动化的重要组成部分,是自动化行业中设备实现精确定位、精准 运动必要途径。执行机构严格按照控制信号进行动作,当收到控制信号时,执行机构 按要求动作,当控制信号消失时,执行机构自行停止,正因为这一特点,人们称之为 伺服系统[18]
。因此,伺服系统的性能好坏由执行机构能否准确执行控制信号决定,执行机构严格准确按照控制信号动作,则系统性能好,反之则系统性能差。
直线电机直接驱动方式
伺服系统简介
伺服系统是工业自动化的重要组成部分,是自动化行业中设备实现精确定位、精准 运动必要途径。执行机构严格按照控制信号进行动作,当收到控制信号时,执行机构 按要求动作,当控制信号消失时,执行机构自行停止,正因为这一特点,人们称之为 伺服系统[18]
。因此,伺服系统的性能好坏由执行机构能否准确执行控制信号决定,执行机构严格准确按照控制信号动作,则系统性能好,反之则系统性能差。
 PID
控制自问世以来,由于其控制结构简单,算法易于实现等特点,广泛地应用于工业领域中。PID
控制器参数较少,且每个参数都有具体的物理意义,易于调节,最重要的是 PID
控制器不依赖于系统模型,对于无法获取准确的数学模型的控制对象也能取得较好的控制效果。
PID
控制自问世以来,由于其控制结构简单,算法易于实现等特点,广泛地应用于工业领域中。PID
控制器参数较少,且每个参数都有具体的物理意义,易于调节,最重要的是 PID
控制器不依赖于系统模型,对于无法获取准确的数学模型的控制对象也能取得较好的控制效果。
以上是关于高速高精度半导体运动台设计的主要内容,如果未能解决你的问题,请参考以下文章