基于DSP+FPGA高速宏微半导体运动平台的控制与实现
Posted 深圳信迈科技DSP+ARM+FPGA
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了基于DSP+FPGA高速宏微半导体运动平台的控制与实现相关的知识,希望对你有一定的参考价值。
在半导体芯片制造装备中,为了实现半导体芯片制造的高质量和高效率,通常需要其运动部件具有较高的运动性能,如,对于高端引线键合机,通常要求其运动平台在 15-20g 的加速度下以 15-20Hz 的运动频率实现 1-2μm 的定位精度 [3] 。对于典型的芯片光刻机,其运动平台需要在 100-150mm 的长行程下达到几十纳米的定位精度[4] 。此外,半导体芯片不断向着更高效率和更高精密化的方向发展,为了进一步满足微电子制造业的高端需求,半导体芯片制造装备中的高加速精密运动平台需要同时满足大行程、高动态响应,高精度定位的综合性要求。宏微运动平台结合了高速、大行程运动和高精度定位的运动特点,是实现高速大行程精准定位的一种重要运动方式,因此,本课题针对高速、高加速、大行程宏微精密运动平台开展深入研究,着力解决宏微运动平台高速大行程下的快速高精密定位的重要问题,对于提高我国微电子制造装备的自主能力与推动我国微电子制造产业的蓬勃发展具有重要意义。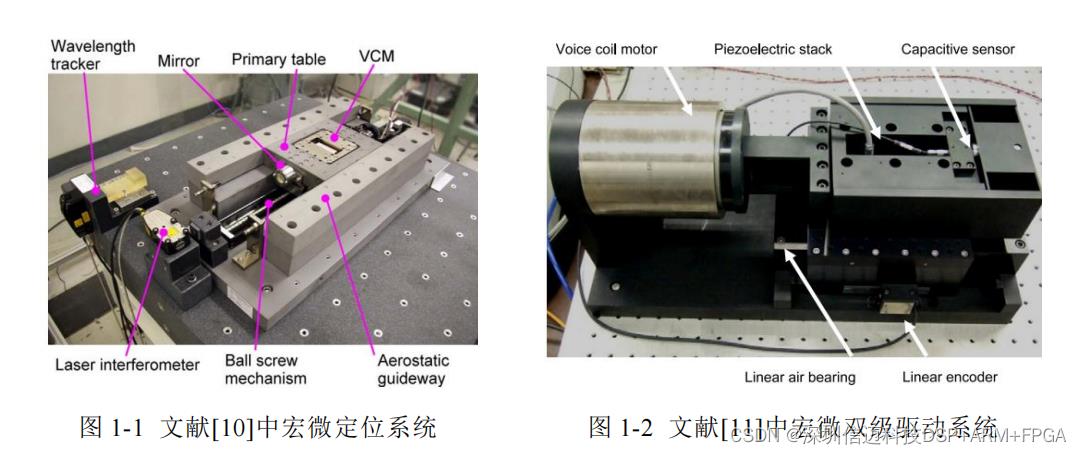 为了实现宏微运动平台的快速高精密定位,对其控制系统的设计尤为重要。尤其是平台工作在纳米级定位需求时,平台在运动及定位过程中受到外部扰动、电气噪声、模型参数摄动、非线性摩擦力等多种复杂扰动都不可避免的影响着平台的定位性能。宏微复合平台由于是双级驱动系统,其本质上为一个双输入单输出系统(DISO)。但考虑到宏
/
微两部分各自的特点及功能,在实际对其控制中,往往采取分时启动、切换控制的方式将宏微双级系统分为两个单输入单输出系统(SISO)
。因此针对宏微复合双驱动平台的控制策略主要分为宏运动部分控制—被控制对象常常以直线电机为代表的直驱系统;微运动部分控制—以压电陶瓷+
柔性机构为代表的微驱动系统;以及宏微切换控制策略实现宏微运动平台的复合定位。
为了实现宏微运动平台的快速高精密定位,对其控制系统的设计尤为重要。尤其是平台工作在纳米级定位需求时,平台在运动及定位过程中受到外部扰动、电气噪声、模型参数摄动、非线性摩擦力等多种复杂扰动都不可避免的影响着平台的定位性能。宏微复合平台由于是双级驱动系统,其本质上为一个双输入单输出系统(DISO)。但考虑到宏
/
微两部分各自的特点及功能,在实际对其控制中,往往采取分时启动、切换控制的方式将宏微双级系统分为两个单输入单输出系统(SISO)
。因此针对宏微复合双驱动平台的控制策略主要分为宏运动部分控制—被控制对象常常以直线电机为代表的直驱系统;微运动部分控制—以压电陶瓷+
柔性机构为代表的微驱动系统;以及宏微切换控制策略实现宏微运动平台的复合定位。
控制器设计
以上是关于基于DSP+FPGA高速宏微半导体运动平台的控制与实现的主要内容,如果未能解决你的问题,请参考以下文章
8英寸铝金属刻蚀机半导体设备DSP/ARM+FPGA运动控制器
信迈TMS320C6655 + xilinx Artix7评估板 DSP+FPGA高速数据采集运动控制机器视觉一体卡