高速高精度半导体运动台设计
Posted 深圳信迈科技DSP+ARM+FPGA
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了高速高精度半导体运动台设计相关的知识,希望对你有一定的参考价值。
高速高精运动平台的性能不仅与运动控制器、伺服驱动相关,也与电机本身的性能密切相关。如图 5-2 所示的运动平台采用了雅科贝思的直线电机,直接驱动负载,刚性高,响应快,同时选用了高性能多轴运动控制卡和 GTHD 系列高性能伺服驱动器作为平台的伺服控制系统。
X-Y 运动平台位置检测装置
高速高精的运动平台的精度要求在μm 级别,这就要求必须选择高分辨率的检测装置。直线电机常采用的位置检测装置有激光、磁栅、感应同步器、光栅等。激光器件作为检测装置,精度高且稳定,但是成本高。磁栅和感应同步器都是以电磁感应为原理的,成本低,但是不稳定,容易受到干扰。考虑到成本和可靠性,选择光栅作为位置检测装置最为合适。
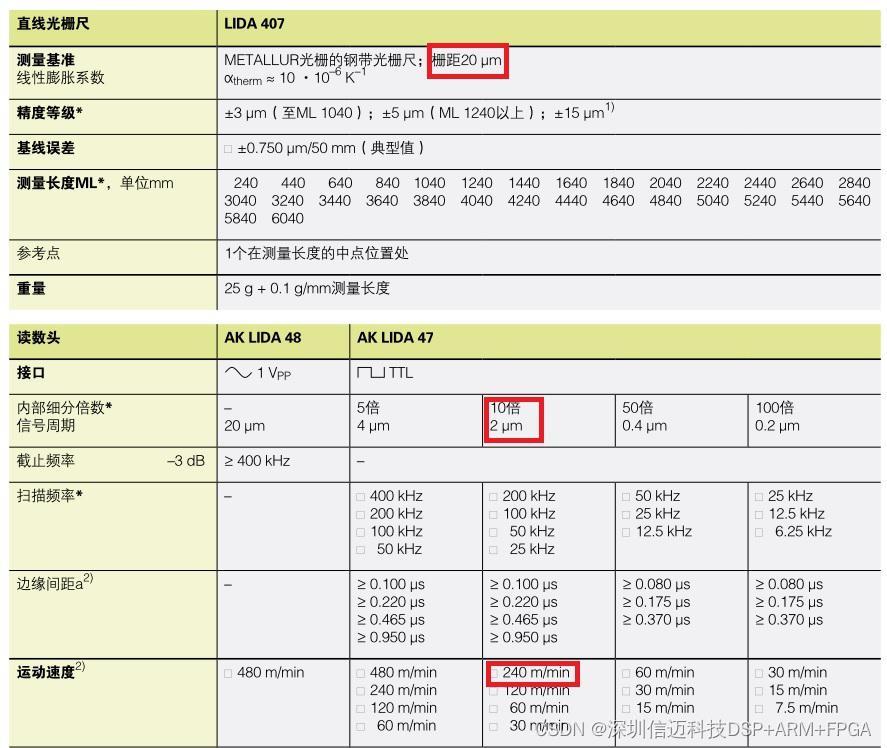
光栅尺是由标尺光栅和指示光栅两部分组成,指示光栅一般安装在读数头里。光栅的表面刻有均匀的条纹,条纹相互平行,条纹之间的距离(栅距)d 相等。光栅尺安装完成后,标尺光栅跟指示光栅是相互平行放置的,且两个光栅的条纹之间形成一个小角度θ,在光源的照射下,形成明暗相间的条纹,称为“莫尔条纹”。当标尺光栅跟指示光栅发生相对移过一个栅距时,莫尔条纹也进行移动过一个条纹距离。因为莫尔条纹的变化规律近似于三角函数,所以通过对莫尔条纹进行计数,从而测得标尺光栅跟指示光栅的相对位移,即可得到平台的移动距离。光栅尺的安装方式较为灵活,可安装在运动平台的不同位置。由图 5-1 可以看出,本课题的 X-Y 运动平台的两个运动轴的光栅尺的读数头相对其运动方向都是固定的,标尺光栅则是安装在活动部位上。本课题研究的 X-Y 平台采用的是 Heidenhain 公司的 LIDA477 系列的光栅尺,光栅尺的具体参数如图 5-3 所示。光栅尺的栅距是 20μm,采用了 10 倍的细分倍数,分辨率为 2μm,最大速度为 4m/s,通过驱动器的 4 倍频技术,平台的测量分辨率为 0.5μm。
运动控制系统组成
本课题的研究对象 X-Y 运动平台的控制系统包括硬件和软件两部分。硬件部分主要由工控机、运动控制卡、驱动器和 X-Y 运动平台组成。软件部分主要包括上位机软件和底层伺服控制算法。
1、运动控制硬件
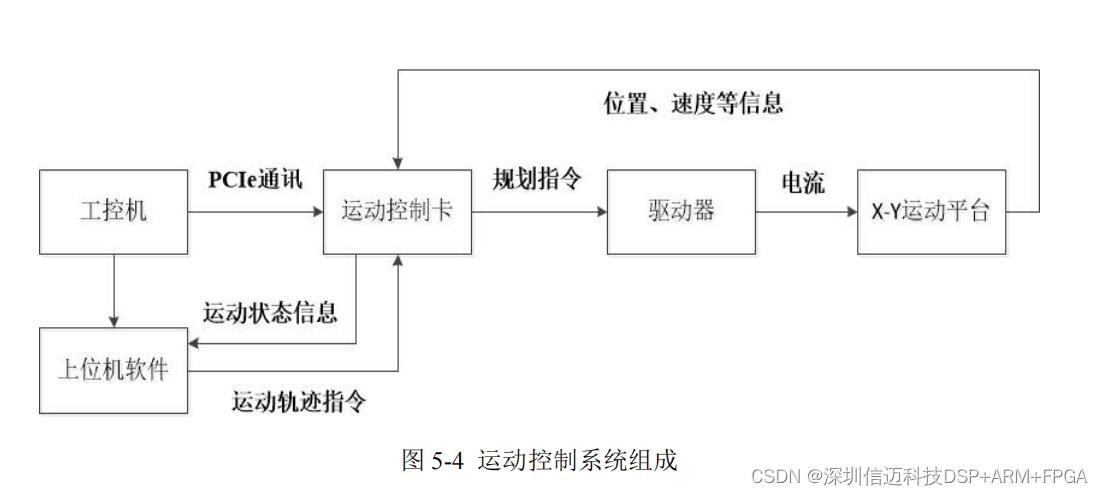
运动控制卡一般通过 PCI/PCIe 接口与工控机实现通讯,从而接收上位机软件发送的指令,并将运动规划指令送到驱动器中,驱动器进行运算、放大等处理,最终输出电流到直线电机,从而让运动平台进行动作,控制系统图如图 5-4 所示。
2、运动控制软件
运动控制软件主要包括底层控制算法和上层界面软件两部分。底层控制算法是基于运动控制卡的 DLM 功能开发的,是基于亚德诺半导体的 DSP 开发环境 CCES2.8.0开发的,主要用于实现伺服控制运算。DLM 最大的特点是允许用户在 DSP 里自定义控制算法和规划算法。上层界面软件是基于 Visual Studio 2013 开发环境的 MFC 开发的,主要用于提供友好的人机交互界面,完成控制参数设置、运动调试、数据显示、数据存储等任务。本课题开发了一款 X-Y 运动平台调试软件,即运动控制软件的上层界面软件,软件界面截图如图 3-7 所示,软件具体功能参考 3.3.2 章节。
运动控制软件的功能结构如图 5-7 所示,dsp.ldr 是运动控制卡的固件,支持运动控制卡的各种指令,dlm.ldr 是基于本课题开发的伺服控制算法及运动规划算法。

以上是关于高速高精度半导体运动台设计的主要内容,如果未能解决你的问题,请参考以下文章