车路协同与高精度地图
Posted 爱是与世界平行
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了车路协同与高精度地图相关的知识,希望对你有一定的参考价值。
作为杭绍台智慧高速四大场景之一的“车路协同”,在“浙江首条智慧高速通车,智慧在哪? ”一文中是这么描述的:
杭绍台高速通过集成动态交通流感知、高精定位和高精地图服务、多模式无线通信(5G)、数字化标志标线等先进路侧系统,通过利用大数据构建云控平台,引入AI技术实现智能管控,构建路网综合运行监测与预警系统,让高速公路在技术层面上达到具备“无人驾驶”的条件。此外,还将实现人-车-路的协同和信息交互,驾驶员可以通过、板、智能网联汽车的车载终端等多种方式掌握实时路况,避免拥堵。
文中同时提到了“车路协同”和“高精度地图”。出于好奇网上搜了下“车路协同与高精度地图”,大部分文章还是跟自动驾驶相关,不多的几篇文章让人对车路协同和高精度地图的关系似懂非懂。本文试图帮读者捋一捋它俩之间的关系,首先介绍了车路协同及相关内容,然后简单介绍了高精度地图,最后重点介绍了高精度地图怎么服务车路协同,车路协同又是怎么反哺高精度地图的。
1 认识车路协同
上文提到了几个热点名词“车路协同”、“无人驾驶”、 “车联网”。此外,大家应该还会经常听到“V2X”、“C-V2X”等名词,比较容易混淆,以下是这几个名词的解释:
(1) **车路协同:**采用先进的无线通信和新一代互联网等技术,全方位实施车车、车路动态实时信息交互,并在全时空动态交通信息采集与融合的基础上开展车辆主动安全控制和道路协同管理,充分实现人车路的有效协同,保证交通安全,提高通行效率,从而形成的安全、高效和环保的道路交通系统。(来自百度百科)
(2) **无人驾驶:**也称自动驾驶,泛指协助或代替人类驾驶汽车的技术。(来自知乎)
(3) **车联网:**车辆上的车载设备通过无线通信技术,对信息网络平台中的所有车辆动态信息进行有效利用,在车辆运行中提供不同的功能服务。(来自百度百科)
(4) **V2X:**车用无线通信技术(Vehicle to Everything, V2X),是将车辆与一切事物相连接的新一代信息通信技术,其中V代表车辆,X代表任何与车交互信息的对象,当前X主要包含车、人、交通路侧基础设施和网络。(来自C-V2X白皮书)
(5) **C-V2X:**C-V2X是基于蜂窝(Cellular)通信演进形成的车用无线通信技术(Vehicle to Everything,V2X)技术,可提供Uu接口(蜂窝通信接口)和PC5接口(直连通信接口)。
以上这几个词的关系又是如何呢?以下纯属个人思考的结果,请谨慎参考。
(1) **车路协同不等于无人驾驶。**车路协同是实现自动驾驶的一种路径,但不是自动驾驶的全部,因为还有单车智能自动驾驶,即完全依靠车的智能系统来完成自动驾驶。车路协同不完全是为了自动驾驶,主要是为了信息服务、交通安全和交通效率。
(2) **车路协同不等于车联网。**车联网包括车路协同,除此之外还有车云协同、车车协同、车人协同、车内信息交互等。
(3) **V2X不等于车路协同,也不等于车联网。**V2X是一项通信技术,车路协同和车联网使用V2X这项技术来实现联网和信息交互。
(4) **C-V2X不等于V2X。**C-V2X是V2X的一种,采用的是蜂窝通信技术,用于区别美国的DSRC(专用短程通信技术)。
车路协同系统中还有三类关键设备RSU、OBU和MEC,具体介绍如下:
**RSU:**即路侧单元(Road Side Unit),基于移动通信技术,提供车辆高精度定位、高精度地图等服务,支持远程OTA。
**OBU:**即车载单元(On Board Unit),基于移动通信技术,与RSU进行通讯的一种车载设备。
**MEC:**即多接入边缘计算(Multi-access Edge Computing),将应用场景从移动蜂窝网络进一步延伸至其他接入网络。
以大家熟知的ETC举例,装在车上的插卡设备就是OBU,收费站车道上装了RSU,然后车开过时RSU和OBU进行通信,然后就可以自动扣费了。只不过ETC目前是基于美国主推的DSRC,而我国在主推自己的C-V2X(美国封锁华为原因大家都懂的),目前更多用的是LTE-V2X,但很高兴几天前3GPP标准冻结了R16版本,预示着咱们5G-V2X将有新的进展。
2 车路协同的过去、现在和未来
2010年,时任科技部副部长吴忠泽先生在“迎接中国智能交通新时代”一文中就已经提到了车路协同、V2X,当时还在学习美国的DSRC(专用短程通信技术)和VII,日本的smartway等等。
2013年,我国工业和信息化部、国家发展和改革委员会、科学技术部联合推动成立IMT-2020(5G)推进组,聚合移动通信领域产学研用力量、推动第五代移动通信技术研究、开展国际交流与合作。
2017年,正式成立了C-V2X工作组,全面负责组织开展LTE-V2X和5G-V2X的技术研究、试验验证和产业与应用推广等工作。
2018-2019年,交通运输部发文《关于加快推进新一代国家交通控制网和智慧公路试点的通知》、《数字交通发展规划纲要》和国务院发文《交通强国建设纲要》中密集提及车路协同,可见政府对车路协同的支持力度之大。
同时,随着多个厂家2020年自动驾驶量产计划推迟甚至取消,单车智能自动驾驶降温的同时车路协同迅速升温,百度从Appollo自动驾驶开放平台直接派生出Appollo车路协同开源方案,华为、阿里、腾讯也纷纷宣布自己的车路协同战略。
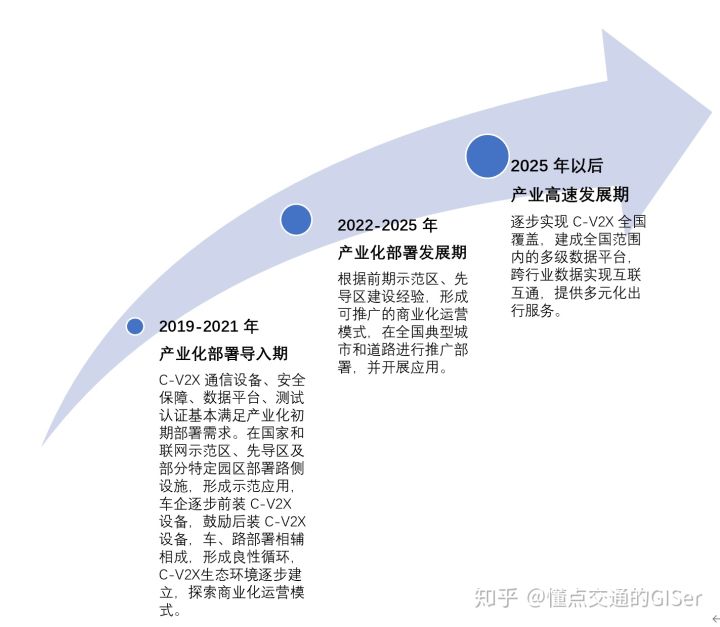
2019年,由中国智能网联汽车产业创新联盟(CAICV)、 IMT-2020(5G)推进组 C-V2X 工作组、中国智能交通产业联盟(C-ITS)、中国智慧交通管理产业联盟(CTMA)四家单位联编制的《C-V2X产业化路径及时间表研究白皮书》中对车路协同的未来做了如下描述:
3 认识高精度地图
高精度地图,通俗来讲就是精度更高、数据维度更多的电子地图。
高精度地图可以分为四层,第一层是传统的静态数据,即高精地图的基础道路路网;
第二层是相对静态数据,包括基础设施例如地面标线、标志标牌和建筑物信息等;
第三层是相对动态数据,包括一些交通状况信息,例如红绿灯、交通拥堵、天气引起的道路湿滑等信息;
第四层是高度动态数据,包括在道路路段内的车辆、行人、骑车人的动态信息以及预测的车位置或交通流信息。

4 高精度地图的采集与生产
按照自然资源部要求,高精度地图采集与生产的企业需申请导航电子地图甲级测绘资质。资质对采集设备、测绘专业人数以及所具备的管理规范及平台工具都有较高的要求,这也是为何到目前为止全国总共才有20多张牌照。
自2017年进入高精度地图这个领域,直到2019年3月公司拿下牌照,我们从无到有建立了一整套从外业到内业到质检到数据管理的内循环流程以及从研发到生产到项目的外循环流程。真正体会到高精度地图的生产和制作不是仅仅花几百万买几辆测绘车就能做的。
目前高精度地图的测绘和使用个人认为是处于放水养鱼的阶段,有些没有导航电子地图测绘资质的企业也在做高精度地图测绘工作,自然资源部应该也是考虑到目前自动驾驶和车路协同等新技术需要给大家更多的发挥空间。随着产业的逐步成熟相信自然资源部会对高精度地图的测绘监管工作逐步规范起来,这也是一个行业能够良性发展的必备条件。
关于高精度地图的采集,目前主流图商的采集方法都类似,无非就是车载采集(含大车、小车、手推车等)、无人机采集、背包采集等几种方式,那些以众包入局的创业企业或逐渐消失在众人视野或转型传统采集方式。除此之外,我们还有两大杀手锏,一是支持用道路CAD图纸(设计图、施工图、竣工图)来生产高精度地图,二是支持用3DRoad将二维高精度地图自动转成三维道路地图以及交通仿真路网图,这样可以大大降低生产成本以及提高地图精度。

5 高精度地图如何服务车路协同?
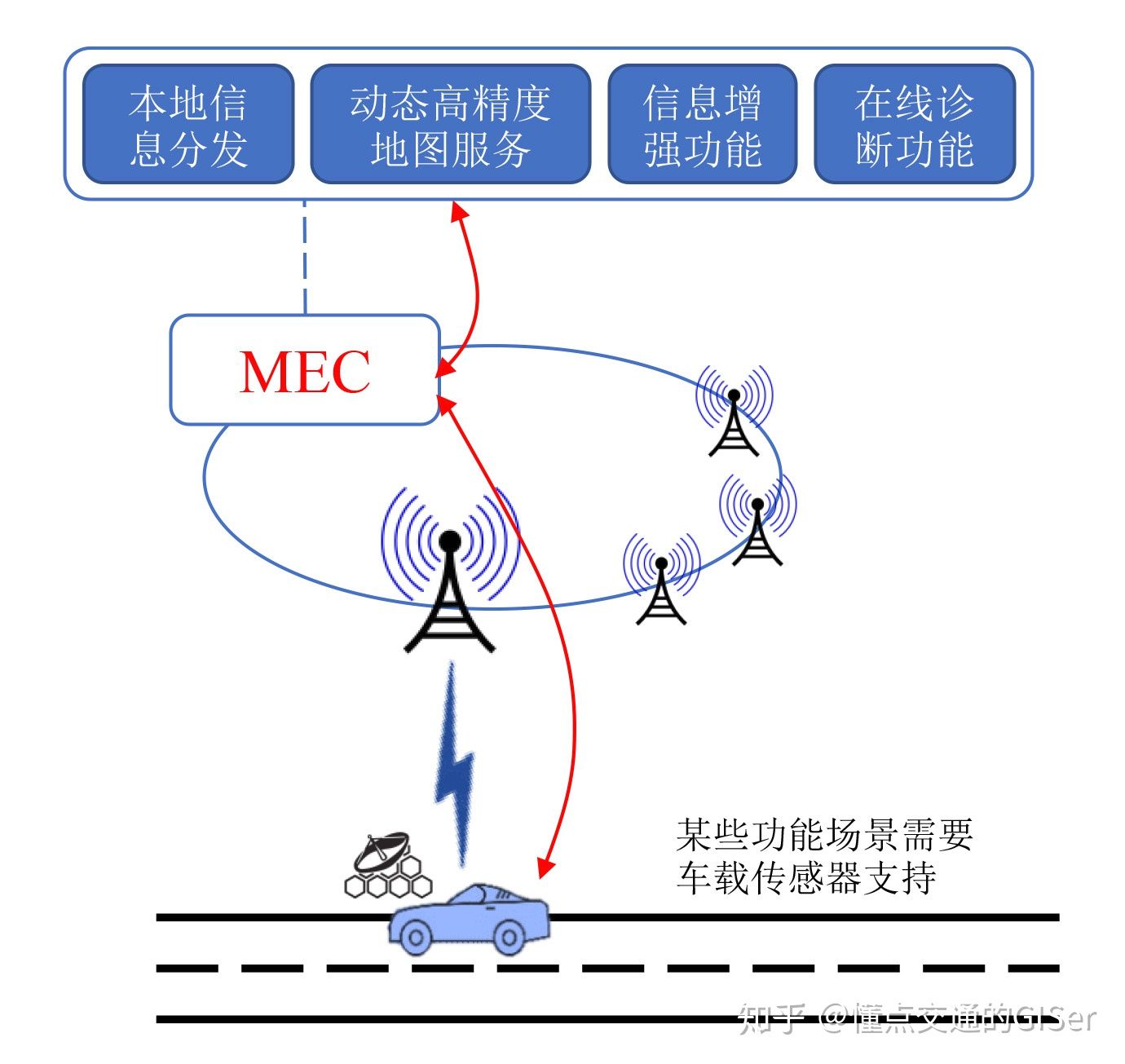
一般来说,图商会把整个城市、区域或者高速公路的高精度地图存放在云端,通过云对外提供数据服务。通过核心网分发局部高精度地图到各MEC进行边缘存储和计算,经由RSU借助Uu接口或PC5接口支持实现“人-车-路-云”协同交互,为车辆的安全驾驶、高精度定位和自动驾驶以及精准信息等提供服务。

MEC存储动态高精度地图,向车辆分发高精度地图信息,减少时延并降低对核心网传输带宽的压力。车辆通过高精度定位模块获取位置向MEC发送,部署在MEC的地图服务提取相应位置的高精度地图信息发送给车辆。
6 车路协同如何反哺高精度地图?
高精度地图众包除了根据车载设备自动识别上传与云端高精度地图比对更新,还可以由车路协同系统中的路侧智能设备和路侧单元来完成。当路侧摄像头、激光雷达、车速检测仪等智能设备或装有OBU的车辆检测到现实路况与高精度地图存在偏差时,可将自身传感信息上传至MEC用于对地图进行更新,随后MEC的地图服务可选择将更新后的高精度地图回传至中心云平台。这里的众包不仅仅针对静态信息和相对静态信息而言,还包括相对动态信息和高度动态信息。
综上所述,高精度地图是车路协同系统不可或缺的一类信息服务信源,车路协同系统又反哺高精度地图,为高精度地图的动态更新提供有力的支持。
参考资料
1.浙江首条智慧高速通车,智慧在哪?
2.IMT-2020(5G)推进组C - V 2 X 白皮书
3.MEC与C-V2X融合白皮书
4.C-V2X产业化路径及时间表研究白皮书
以上是关于车路协同与高精度地图的主要内容,如果未能解决你的问题,请参考以下文章