自动驾驶中激光雷达如何检测障碍物
Posted 泠山
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了自动驾驶中激光雷达如何检测障碍物相关的知识,希望对你有一定的参考价值。
自动驾驶中激光雷达如何检测障碍物
Reference:
- 高翔,张涛 《视觉SLAM十四讲》
- 自动驾驶中激光雷达检测障碍物理论与实践
激光雷达是利用激光束来感知三维世界,通过测量激光返回所需的时间输出为点云。它集成在自动驾驶、无人机、机器人、卫星、火箭等许多领域。
1. 介绍
1.1 激光雷达-一种三维激光传感器
激光雷达传感器利用光原理进行工作,激光雷达代表光探测和测距。它们可以探测到 300m 以内的障碍物,并准确估计它们的位置。在自动驾驶汽车中,这是用于位置估计的最精确的传感器。
 激光雷达传感器由两部分组成:激光发射(顶部)和激光接收(底部)。发射系统的工作原理是利用多层激光束,层数越多,激光雷达就越精确。层数越多,传感器就越大。激光被发射到障碍物并反射,当这些激光击中障碍物时,它们会产生一组点云,传感器与飞行时间(TOF)进行工作,从本质上说,它测量的是每束激光反射回来所需的时间。如下图:
激光雷达传感器由两部分组成:激光发射(顶部)和激光接收(底部)。发射系统的工作原理是利用多层激光束,层数越多,激光雷达就越精确。层数越多,传感器就越大。激光被发射到障碍物并反射,当这些激光击中障碍物时,它们会产生一组点云,传感器与飞行时间(TOF)进行工作,从本质上说,它测量的是每束激光反射回来所需的时间。如下图:
 当激光雷达的质量和价格非常高时,激光雷达是可以创建丰富的三维环境,并且每秒最多可以发射200万个点。点云表示三维世界激光雷达传感器获得每个撞击点的精确
(
X
,
Y
,
Z
)
(X, Y, Z)
(X,Y,Z)位置。
当激光雷达的质量和价格非常高时,激光雷达是可以创建丰富的三维环境,并且每秒最多可以发射200万个点。点云表示三维世界激光雷达传感器获得每个撞击点的精确
(
X
,
Y
,
Z
)
(X, Y, Z)
(X,Y,Z)位置。
 激光雷达传感器可以是固态的,也可以是旋转的,固态激光雷达将把检测的重点放在一个位置上,并提供一个覆盖范围(比如FOV为90°)。在后一种情况下,它将围绕自身旋转,并提供360°旋转。在这种情况下,一般把它放在设备顶上,以提高能见度。
激光雷达传感器可以是固态的,也可以是旋转的,固态激光雷达将把检测的重点放在一个位置上,并提供一个覆盖范围(比如FOV为90°)。在后一种情况下,它将围绕自身旋转,并提供360°旋转。在这种情况下,一般把它放在设备顶上,以提高能见度。
激光雷达很少用作独立传感器。它们通常与相机或雷达结合在一起,这一过程称为传感器融合。融合过程可分为早期融合和后期融合。早期融合是指点云与图像像素融合,后期融合是指单个检测物的融合。
1.2 激光雷达的优缺点?
缺点:
- 激光雷达不能直接估计速度。他们需要计算两个连续测量值之间的差值。
- 激光雷达在恶劣的天气条件下工作不好。在有雾或者下雨的情况下,激光会击中它,使场景变得混乱。
- 激光雷达的价格虽然在下降,但仍然很高。
优点:
- 激光雷达可以精确地估计障碍物的位置。到目前为止,还没有更准确的方法。
- 激光雷达处理点云。如果我们看到车辆前方的点云,即使障碍物检测系统没有检测到任何东西,我们也可以及时停车。这是一个很大的安全保证,车辆将不仅依赖于图像的神经网络和概率问题。
1.3 基于激光雷达如何进行障碍物检测?
激光雷达进行障碍物的步骤通常分为 4 个步骤:
- 点云处理
- 点云分割
- 障碍聚类
- 边界框拟合
1.4 点云处理难点
-
稀疏的;
-
不规则----搜索邻居比较困难;
-
缺乏纹理信息;
-
无序的----深度学习很困难;
[ x 1 y 1 z 1 x 2 y 2 z 2 ⋮ ⋮ ⋮ x N y N z N ] = [ x 2 y 2 z 2 x 1 y 1 z 1 ⋮ ⋮ ⋮ x k y k z k ] \\left[\\beginarraycccx_1 & y_1 & z_1 \\\\ x_2 & y_2 & z_2 \\\\ \\vdots & \\vdots & \\vdots \\\\ x_N & y_N & z_N\\endarray\\right]=\\left[\\beginarraycccx_2 & y_2 & z_2 \\\\ x_1 & y_1 & z_1 \\\\ \\vdots & \\vdots & \\vdots \\\\ x_k & y_k & z_k\\endarray\\right] ⎣⎢⎢⎢⎡x1x2⋮xNy1y2⋮yNz1z2⋮zN⎦⎥⎥⎥⎤=⎣⎢⎢⎢⎡x2x1⋮xky2y1⋮ykz2z1⋮zk⎦⎥⎥⎥⎤如上面的行换了,表达的还是同一个物体。对于深度学习而言,输入进去的矩阵是不一样的就会产生不同的输出,但是我们希望输出是一样的。
-
旋转同变性/不变性:我们旋转一些点,它的坐标是不一样的,但是它还是同一个物体。
2. 点云处理
2.1 点云处理-体素网格
为了处理点云,我们可以使用最流行的库 PCL(point cloud library)。它在 Python 中可用,但是在 C++ 中使用它更为合理,因为语言更适合机器人学。它也符合 ROS(机器人操作系统)。PCL 库可以完成探测障碍物所需的大部分计算,从加载点到执行算法。这个库相当于 OpenCV 的计算机视觉。因为激光雷达的输出很容易达到每秒 100000 个点,所以我们需要使用一种称为体素网格的方法来对点云进行下采样。
2.1.1 什么是体素网格?
体素网格 是一个三维立方体,通过每个立方体只留下一个点来过滤点云。立方体越大,点云的最终分辨率越低。最终,我们可以将点云的采样从几万点减少到几千点。
 滤波完成后我们可以进行的第二个操作是 ROI(感兴趣区域) 的提取,我们只需删除不属于特定区域的每一些点云数据,例如左右距离 10m 以上的点云,前后超过 100m 的点云都通过滤波器滤除。现在我们有了降采样并滤波后的点云了,此时可以继续进行点云的分割、聚类和边界框实现。
滤波完成后我们可以进行的第二个操作是 ROI(感兴趣区域) 的提取,我们只需删除不属于特定区域的每一些点云数据,例如左右距离 10m 以上的点云,前后超过 100m 的点云都通过滤波器滤除。现在我们有了降采样并滤波后的点云了,此时可以继续进行点云的分割、聚类和边界框实现。
3 三维点云的分割
3.1 RANSAC
点云分割任务是将场景与其中的障碍物分离开来,其实就是地面的分割。一种非常流行的分割方法称为 RANSAC(Random Sample consenses)。该算法的目标是识别一组点中的异常值。点云的输出通常表示一些形状。有些形状表示障碍物,有些只是表示地面上的反射。RANSAC 的目标是识别这些点,并通过拟合平面或直线(拟合的是地面)将它们与其他点分开。
 为了拟合直线,我们可以考虑线性回归。但是有这么多的异常值,线性回归会试图平均结果,而得出错误的拟合结果,与线性回归相反,这里的 RANSAC 算法将识别这些异常值,且不会拟合它们。
为了拟合直线,我们可以考虑线性回归。但是有这么多的异常值,线性回归会试图平均结果,而得出错误的拟合结果,与线性回归相反,这里的 RANSAC 算法将识别这些异常值,且不会拟合它们。
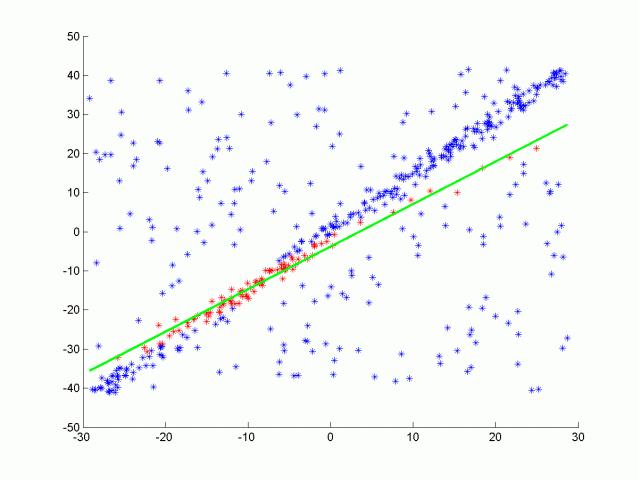
如上图所示我们可以将这条线视为场景的目标路径(即道路),而孤立点则是障碍物。
3.1.1 RANSAC 的实现
过程如下:
- 随机选取2个点
- 将线性模型拟合到这些点计算每隔一点到拟合线的距离。如果距离在定义的阈值距离公差范围内,则将该点添加到内联线列表中。
因此需要算法一个参数:距离阈值。
最后选择内点最多的迭代作为模型;其余的都是离群值。这样,我们就可以把每一个内点视为道路的一部分,把每一个外点视为障碍的一部分。RANSAC应用在3D点云中。在这种情况下,3个点之间的构成的平面是算法的基础。然后计算点到平面的距离。
下面点云为 RANSAC 算法的结果,紫色区域代表车辆(RANSAC 在这里应该只用来区分地面了):

RANSAC 是一个非常强大和简单的点云分割算法。它试图找到属于同一形状的点云和不属于同一形状的点云,然后将其分开。
4. 障碍聚类
4.1 点云聚类
RANSAC 的输出是障碍点云和地面。由此,可以为每个障碍定义独立的簇。它是如何工作的?
聚类是一系列机器学习算法,包括:k-means(最流行)、DBScan、HDBScan 等。这里可以简单地使用欧几里德聚类,计算点之间的欧几里德距离。
4.1.1 计算 KD-Tree
在进行点云聚类问题时,由于一个激光雷达传感器可以输出几万个点云,这将意味有上万次的欧几里德距离计算。为了避免计算每个点的距离,这里使用 KD-Tree 进行加速。
KD-Tree 是一种搜索算法,它将根据点在树中的XY位置对点进行排序,一般的想法-如果一个点不在定义的距离阈值内,那么x或y更大的点肯定不会在这个距离内。这样,我们就不必计算每一个点云。
4.1.2 欧式聚类
过程如下:
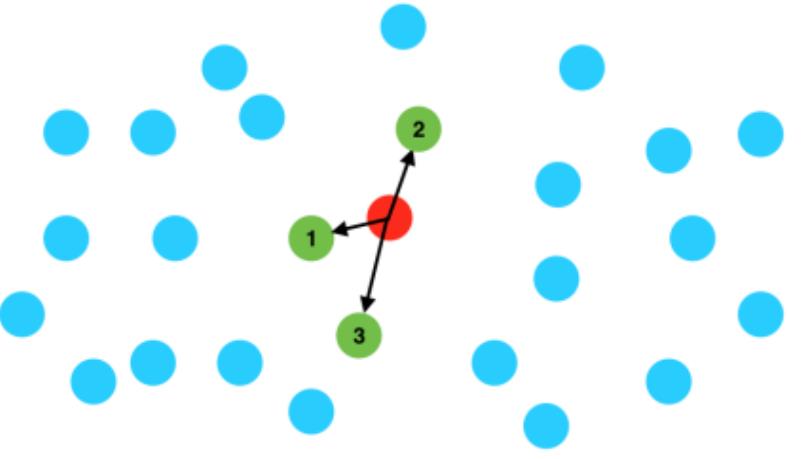
- 选取两个点,一个目标点和一个当前点;
- 如果目标和当前点之间的距离在距离公差范围内,请将当前点添加到簇中。
- 如果没有,选择另一个当前点并重复。
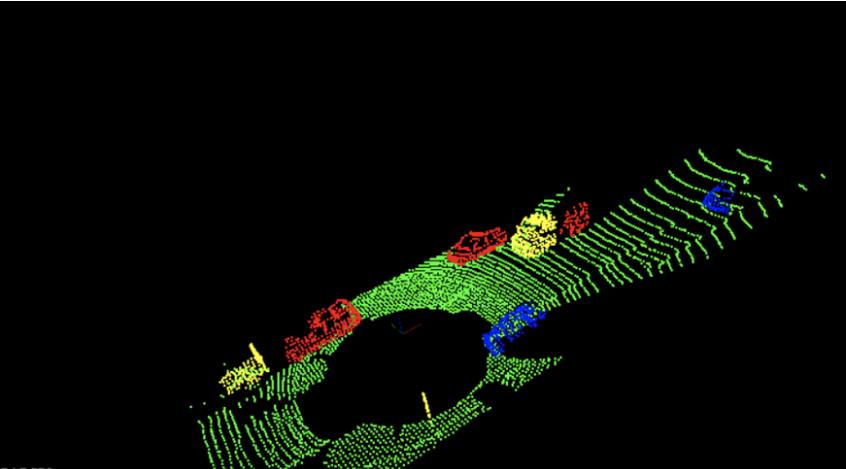
点云欧式聚类算法就是将一组点云按其距离进行分割。聚类算法以距离阈值、最小聚类数目和最大聚类数目作为输入。通过这种方式,可以过滤“幽灵障碍物”(一个单点云在空间中是没有理由存在的),并定义一个封闭的障碍物距离。如下图这里用不同颜色来代表聚类后的障碍物点云簇。
4.2 最邻近(NN)问题
-
K-NN
在空间 M M M 中给定点集 S S S,一个查询点 q ∈ M q\\in M q∈M,在 S S S 中查找 k k k 个最近点。
-
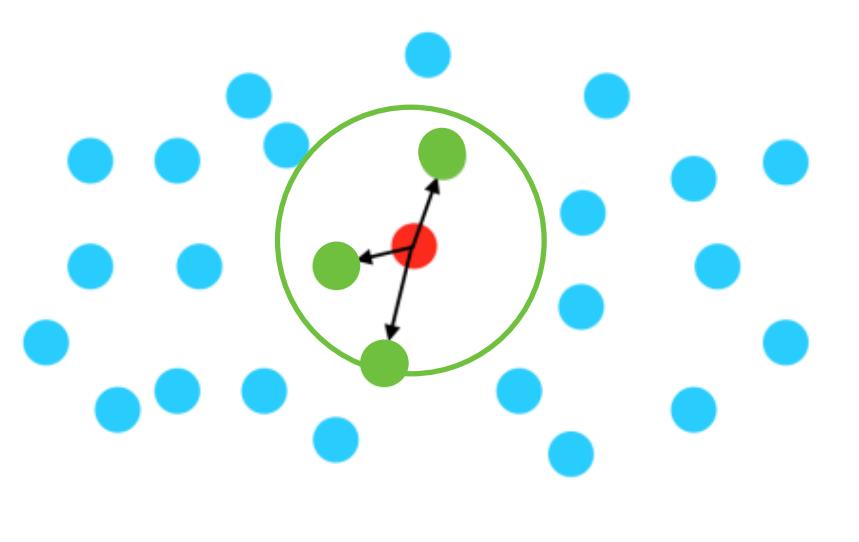
Fixed Radius-NN
在空间 M M M 中给定点集 S S S,一个查询点 q ∈ M q\\in M q∈M,在 S S S 中查找所有符合 ∣ ∣ s − q ∣ ∣ < r ||s-q||<r ∣∣s−q∣∣<r 的点。
4.2.1 为什么 NN 问题很重要
- 它几乎无处不在
- 表面法向量估计
- 噪声滤波
- 采样
- 聚类
- 深度学习
- 特征检测 / 描述
- 为什么不简单的直接调用开源库(flann, PCL, ect.)
- 它们不够高效:它们是通常使用的库,没有对 2D/3D 做优化;大多数开源的八叉树实现是低效的,而八叉树在 3D 中是最有效率的
- 很少有 NN 库基于 GPU 的
4.2.2 为什么点云的 NN 很困难
- 不规则:点云可以分布在任何地方
- 维度灾难:点云可以是三维的,与二维相比的数据量是指数上升的。也可以建立一个三维网格,将点云转化成图像一样的东西,但是网格大部分区域是空白的,而且网格大小的选取也是一个问题。因此使用网格并不高效。
4.2.1 为什么最邻近在点云中如此困难
图像:
一个邻居简单的表示为
x
+
Δ
x
,
y
+
Δ
y
x+\\Delta x,y+\\Delta y
x+Δx,y+Δy.
点云:
- 不规则的:可以分布在图像中任何一个地方;
- 维数灾难:网格大部分是空白的,原理上就很低效。
4.3 BST(Binary Search Tree), kd-tree, octree 核心思想
- 空间分割:
1. 将空间划分成不同面积;
2. 只寻找一部分区域,而不是所有的数据点。 - 停止标准:
1. 如何跳过一些区域:每个区域都会有一个最差距离;
2. 如何停止 k-NN/radius-NN 查找: 如果知道可能的结果都在某个区间里面,那么查找完就结束了;
4.4 二叉树
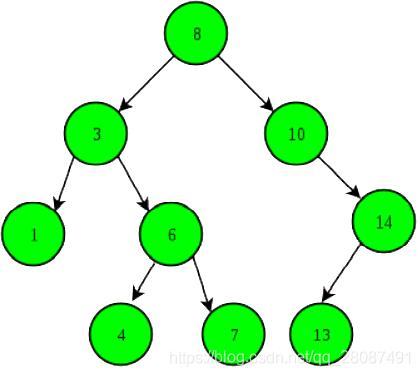
BST 是一个基于节点的树结构:
- 左边的 key 都要比中间 root 小,右边的大。
一个节点包含:
- Key;
- Left child;
- Right child;
- … …
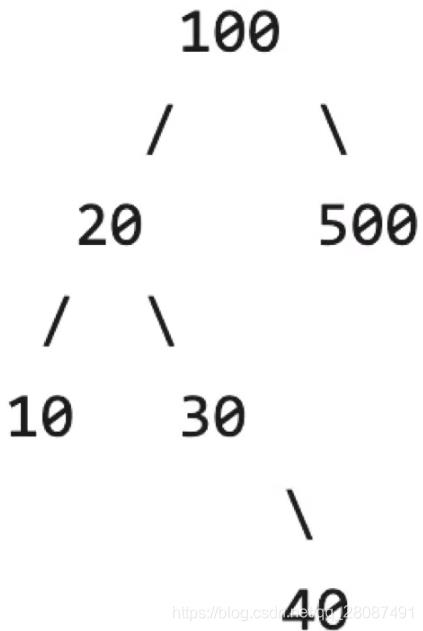
4.4.1 BST 构建/插入
比较小放左边,比较大放右边。如果左右边被占据了,就跟左右边被占据的继续对比。
给定一个一维点集
x
1
,
x
2
,
.
.
.
,
x
n
,
x
i
∈
R
\\x_1, x_2, ...,x_n\\,x_i\\in\\R
x1,x2,...,xn,xi∈R,如一个数组:
[
100
,
20
,
500
,
10
,
30
,
40
]
[100,20,500,10,30,40]
[100,20,500,10,30,40]
4.4.1.1 BST 插入复杂度
最坏的情况是
O
(
h
)
O(h)
O(h),在这里
h
h
h 为在 BST 中点的个数。如将数组 [9,8,7,6,5,4,3] 按顺序插入进一个空的 BST 中:
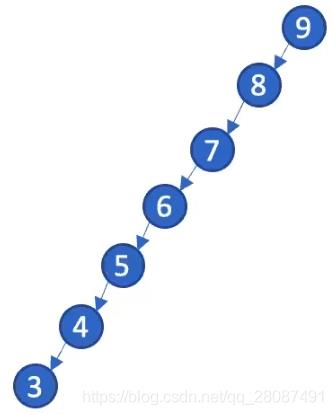
这是一个合法的二叉树但它一无是处。平衡二叉树是另一个话题了。最佳情况: h = l o g 2 n h=log_2n h=log2n。
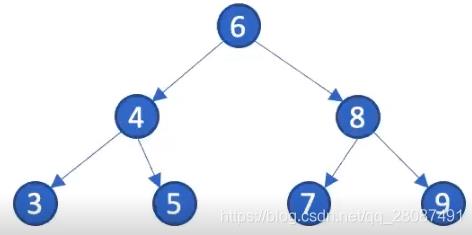
4.4.2 BST 查找
给定一个 BST 和一个待查找 key,决定哪一个 node 等于这个 key,如果没有,则返回 NULL。
4.4.3 1NN 查找最邻近
比如说在下图中查找点 11:
 汽车激光雷达有啥用
汽车激光雷达有啥用