汽车激光雷达有啥用?激光雷达和毫米波雷达的区别
Posted
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了汽车激光雷达有啥用?激光雷达和毫米波雷达的区别相关的知识,希望对你有一定的参考价值。
参考技术A 激光雷达是通过发射光束来探测目标的位置、速度等特征量的雷达系统。它相当于我们的眼睛,具有强大而复杂的信息感知和处理能力。激发光雷达在多年前就已经广泛应用于飞行器避障、侦察成像、导弹制导等领域,应用场景极其丰富。车载激光雷达主要用于自动驾驶,也就是未来的无人驾驶。不过目前只用于自动驾驶辅助。激光雷达主要用在多波束的汽车上,可以帮助汽车感知道路环境,规划自己的行驶路线,控制车辆达到预定的目标。比如根据激光遇到障碍物后的折返时间,可以计算出目标与自身的相对距离,可以帮助车辆识别路口和方向。
激光雷达和毫米波雷达的区别在于,激光雷达使用激光作为探测手段,而毫米波雷达使用毫米波作为探测手段。毫米波的波长是毫米,激光本质上是电磁波,但波长要小得多,大概几百纳米,大概是毫米波的千分之一到万分之一。
此外,从实际效果来看,激光雷达获得的点云数据经过处理后,可以被AI识别,准确判断障碍物的类型,是人还是狗,是车还是树,然后自动驾驶系统可以根据障碍物的类型更加智能,作为判断的依据。
但是毫米波的探测精度要低很多。它只能确定障碍物的大致形状和距离,而不能用来获取更精确的轮廓和三维形状信息。毫米波雷达已经广泛应用于L1、L2的自动驾驶辅助系统,如自动跟车,其中很多都使用了米波雷达。
比如 特斯拉 就擅长结合成熟的低成本技术,通过他的软件实现复杂的功能。现在,它主要利用摄像头和毫米波雷达的结合来提供自动驾驶所需的实时路况输入。
@2019
自动驾驶技术-环境感知篇:激光雷达毫米波雷达超声波雷达相关技术介绍
在上一篇《自动驾驶技术架构和综述》文章中我们介绍了自动驾驶三个核心环节,分别是环境感知和定位、决策规划、执行控制。接下来这章将会针对环境感知和定位展开介绍,环境感知和定位包含环境感知、定位、V2X 3个子模块。
环境感知指的是通过摄像头、传感器、雷达对自动驾驶行为的参与方环境的监控以及信息获取。完整的环境感知技术方案需要多方的信息协调构成,本文将重点介绍下雷达相关的自动驾驶技术。分为3个模块:分别是激光雷达、毫米波雷达、超声波雷达的优缺点,雷达信息的标定,目前雷达技术在自动驾驶车辆的应用。
01 三种雷达优缺点
(1)激光雷达
激光雷达又称为LiDAR,激光雷达的工作原理是通过发射信号和反射信号的对比,构建出点云图,从而实现诸如目标距离、方位、速度、姿态、形状等信息的探测和识别。
激光雷达的安装位置一般位于车顶,目前在北京很多自动驾驶路段,大家可以看到一些相关路测车辆顶部配备的激光雷达部件。

激光雷达的测距原理很简单,因为激光在空气中以光速传播。雷达每次发送一个脉冲,如果发射出的脉冲遇到障碍物会反射,那么接收机接收到回波,就可以计算出目标障碍物和汽车的中间距离。

除了传统的障碍物检测以外,激光雷达还可以应用于车道线检测。

在传统的认知中,人们普遍认为车道线检测需要通过摄像头的视觉相关算法完成,但是实际应用中,特别是雨雪天气下,车道线会被遮挡,这个时候通过激光摄像头可以有效地作为补充。激光摄像头检测车道线的原理是通过激光反射信号的强度,区分出车道线。在常见的介质下,激光雷达的回波强度如下表:
| 介质 | 回波强度/dBz | 可能物体分类 |
| 混凝土、沥青 | 5~8 | 道路、房屋 |
| 特性图层 | 12~30 | 车道线 |
| 植被、金属 | 45~150 | 数目、车辆 |
激光雷达主要优缺点:
优点在于获取信息丰富,抗源干扰能力强(指的是对于环境中其它电磁波带来的干扰)、分辨率和精度高。
主要缺点是在一些极端天气条件下,可能会有一定影响。另外是对于颜色、图案的识别能力很弱,比如不能通过激光雷达识别道路交通牌子上面的内容。价格比较昂贵。
(2)毫米波雷达
说完激光雷达,接着介绍下毫米波雷达。毫米波雷达的波长在1~10mm之间,具有较强的穿透性,可以轻易地穿透塑料等材质,所以毫米波雷达经常被安装到汽车的保险杠上面。

毫米波雷达通常被用来做道路上车辆的测距和测速。具体原理跟激光雷达类似,也是通过发射信号和接收信号之间的频率差,计算出目标之间的距离。
与激光雷达相比,毫米波雷达因为穿透力较强,所以受到雨雪等天气的影响较小。另外就是毫米波雷达的器械体积通常较小,易于在车辆进行安装。缺点在于,当需要探测行人这种反射界面较小的物体的时候,毫米波雷达容易出现误报。
(3)超声波雷达
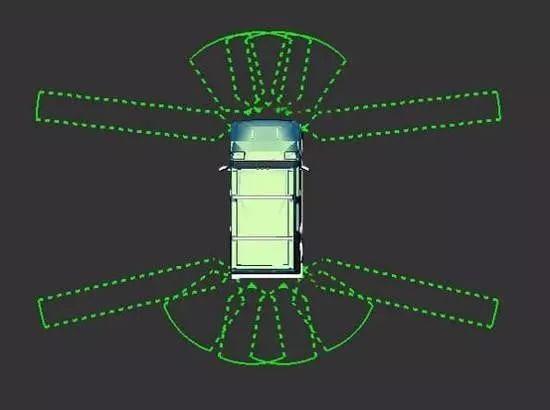
最后说下超声波雷达,超声波雷达目前已经在汽车领域被大面积的应用,超声波雷达也称倒车雷达,主要应用于自动泊车或者倒车辅助的相关环节。
超声波雷达的工作距离一般在3cm到3m之间。作用原理是释放超声波,当遇到障碍物时,超声波反射,从而获取障碍物的具体距离。超声波雷达通常装配在汽车的前后区域。
(4)总结三种雷达的优缺点
最后总结下以上介绍的三种雷达的优缺点。
| 参数 | 超声波雷达 | 激光雷达 | 毫米波雷达 |
| 最大距离 | 近 | 远 | 中 |
| 目标距离、角度分析 | 一般 | 很强 | 强 |
| 环境适应性 | 易受天气影响 | 易受天气影响 | 不受环境影响 |
| 成本 | 低 | 高 | 中 |
| 优点 | 便宜,功能简单 | 功能强大 | 探测距离远,不受天气影响 |
| 缺点 | 只能做近距离探测 | 价格贵,易受天气影响 | 目标识别准确性较低 |
02 雷达信息的标定
介绍完三种雷达的优缺点,接下来介绍下三种雷达的标定。雷达标定是一个空间物理问题,因为车载雷达的布置位置不同,雷达与摄像头的位置也不同,需要在空间上把不同的探测装备放到统一坐标系下,各个设备的传输进来的信息才能做统一分析。
不同雷达之间的标定通常采用的是外参标定,
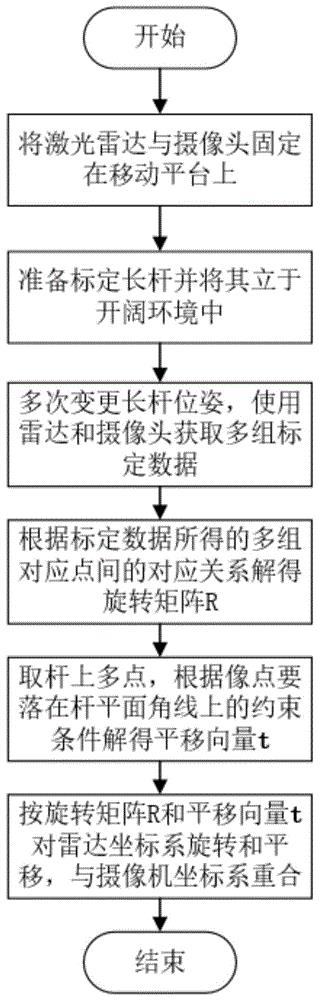
通常可以用以上流程完成雷达的标定,需要在道路上预设一些可以通过雷达捕捉到的标记点。然后雷达和摄像头捕捉到车辆和标记点的空间关系,这样就可以计算出不同雷达或者摄像头之间的平移向量t,这样就可以通过矩阵计算将每个探测装备的信息统一到一个坐标系中。
04 雷达技术在已有车辆的应用
最后介绍下本文介绍的几种雷达在目前的自动驾驶车辆的应用情况。超声波雷达就不用多说了,基本上所有的车辆都已经配置,主要应用于倒车测距环节。
对于激光雷达,目前市面上主流汽车厂商的态度褒贬不一。比如特斯拉的老板马斯克就曾在公开场所里表示激光雷达在自动驾驶领域毫无意义,像人的阑尾一样。主要是因为激光雷达的价格相对昂贵,所以目前Tesla主流车型都没有配备激光雷达。
但是马斯克的态度并没有对激光雷达在自动驾驶领域的应用产生多大影响。提到激光雷达,就要说Luminar这家专注于激光雷达的独角兽企业,目前市值已经达到百亿美金。Luminar的激光雷达,已经获得了丰田、沃尔沃等主流汽车厂商的青睐。
接下来看下国产电动车三杰的情况。小鹏汽车新出的P5其实也已经搭配了双激光雷达以及毫米波雷达:

蔚来汽车也在最新的量产车型上,搭载了激光雷达,提供120°的视野和250米的探测范围。

理想汽车暂时没有搭载激光雷达的车型,但是通过一些信息可以了解到,理想汽车明年推出来的新车很有可能也会配备激光雷达。
未来有一天,如果激光雷达可以较好地解决成本以及极端天气表现相关的问题,我认为激光雷达技术在自动驾驶领域还是有机会的。
再来看看毫米波雷达,目前毫米波雷达的普及率相比于激光雷达要高一些,特斯拉、小鹏、蔚来、理想等汽车的最新车型都已经安装了毫米波雷达,似乎大家已经认可了毫米波雷达+摄像头技术是自动驾驶的必备方案。但是最近马斯克发表言论说特斯拉的新车型,将不会配置毫米波雷达,将采取纯视觉的方案,很多人说这是历史的倒车,具体最终效果怎样,还需要进一步观察。
以上是关于汽车激光雷达有啥用?激光雷达和毫米波雷达的区别的主要内容,如果未能解决你的问题,请参考以下文章
自动驾驶技术-环境感知篇:激光雷达毫米波雷达超声波雷达相关技术介绍