激光雷达和毫米波雷达
Posted wujianming-110117
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了激光雷达和毫米波雷达相关的知识,希望对你有一定的参考价值。
激光雷达和毫米波雷达
一.概述
激光雷达(LiDAR【Light Detection and Ranging】)是激光探测及测距系统的简称,而雷达是英文Radar的音译,源于radio detection and ranging的缩写,意思为"无线电探测和测距",即用无线电的方法发现目标并测定它们的空间位置。
激光雷达相比与微波雷达,激光雷达具有分辨率高、隐蔽性好、抗有源干扰能力强、低空探测性能好、体积小、质量轻。激光雷达的缺点主要是工作时受天气和大气影响大,在大雨、浓烟、浓雾等坏天气里,衰减急剧加大,传播距离大受影响,其次,由于激光雷达的波束极窄,在空间搜索目标非常困难,只能在较小的范围内搜索、捕获目标。
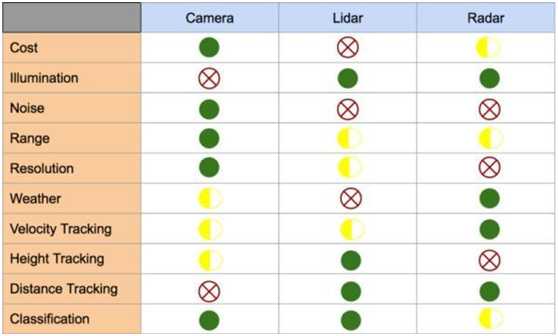
传感器性能对比
分辨率:相机最高,Lidar次之,Radar最低
抗天气影响能力:Radar最好,Camera次之,Lidar最低
追踪物体速度能力:Radar最好,Camera和Lidar差不多
追踪物体高度能力:Lidar最好,Camera次之,Radar最低
追踪距离能力:Lidar,Radar都很准确,Camera最低
辨别能力:Camera和Lidar都较好,Radar较低。
这是David根据他的主观经验写的东西,仅供参考。
二.毫米波雷(radar)达与激光雷达(Lidar)
1. 激光雷达
激光雷达是一种利用光波进行测量的主动探测方式。主动探测方式是指探测系统通过接收自身发出的信号回波来进行测量,区别于例如摄像机等通过接收环境光获取信号的被动探测方式。激光雷达通过测量激光从发出经障碍物反射到被传感器接收所经历的时间,来计算障碍物的距离。
激光雷达也可以叫做Lidar,就是激光(Laser)与雷达(Radar)的集合。其实大家对它也不见得陌生,在很多无人驾驶汽车在道路上进行行驶实验时,车顶上都会架一个看上去和摄像头差不多,但是会一直在一定角度内旋转的“小罐子”,那通常就是激光雷达了。

激光雷达一般分为脉冲式和连续波式两种。脉冲式激光雷达利用时间间隔来计算相对车距;而连续波激光雷达则通过计算反射光与反射光之间的相位差得到目标距离。具体来说,激光雷达的技术点是:飞行时间(TOF,Time of Flight)。当雷达发射激光以后,在遇到障碍物时会发生折返,返回的光束通过雷达内部接收器进行分析,最终通过折返时间和测量信号在处理器进行处理,从而生成精准的3D地图,对周围的环境特征进行再还原。


简单的举例来说,毫米波雷达可以发现路边障碍,但只能“看到”模糊形体,而厘米级精度的激光雷达则可以在极短时间内清楚区分出障碍是路肩还是斜坡,若自动驾驶汽车断定是斜坡后,就可以做出安全开上车道的决策。这种精度对上路行驶的全自动驾驶汽车而言,可以更加接近100%安全。
既然如此为什么不去大力发展全激光雷达呢?其实原因很简单,一个字,贵!比如谷歌所使用的是一款美国的Velodyne公司出品的激光雷达,64线为8万美元、32 线为4万美元,这一个雷达甚至可以买下一台GTR(当然是在美国)。并且在雨雪雾等极端天气 下性能较差,不能全天侯工作。 因此激光雷达与毫米波雷达相比,二者有所长,也有所短。自动驾驶领域激光雷达应用厂商——包括百度、谷歌、福特、奥迪、宝马等等,毫米波雷应用厂商典型代表则为特斯拉并且不断有新的厂商加入。
2. 毫米波雷达
毫米波指波长介于1~10mm的电磁波,毫米波雷达则指工作在毫米波波段的雷达。毫米波的波长介于厘米波和光波之间,因此毫米波兼有微波制导和光电制导的优点。使用在汽车上时其抗环境干扰能力强,可以满足车辆对全天气候的适应性的要求。并且毫米波本身的特性,决定了毫米波雷达传感器器件尺寸小、重量轻等特性,弥补了摄像头等传感器的缺点,使得其在车载应用方面有着很大的优势。
目前国内外主流汽车毫米波雷达频段为24GHz(用于短中距离雷达,15-30米)和77GHz(用于长距离雷达,100-200米)。这类应用在欧美日汽车已经普及化,目前这些地区几乎所有的汽车均开始配备汽车毫米波雷达传感器,其中包括汽车防撞雷达、汽车盲区检测雷达等。

可是即便如此,毫米波雷达却仍然存在着精度低、可见范围短的特点。而这两个缺陷放在自动驾驶中,却差之毫厘谬以千里,极易引起事故。因此在这样的背景下,升级版就应运而生——激光雷达。
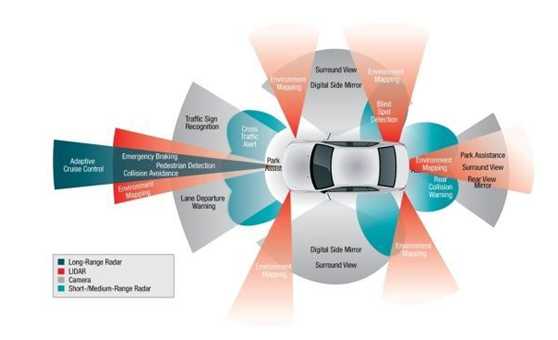
无论传统车企研究的驾驶辅助系统ADAS(Advanced Driver Assistant System),还是由谷歌等互联网巨头期望分一杯羹的无人车领域,归根结底的原理都是差不多的。
自动驾驶好比行人走路,先用眼睛观察确定路线,然后大脑再给身体下指令。对汽车而言,各种雷达、摄像头等传感器就是汽车的眼睛,电子线路就是中枢神经,芯片、算法等控制系统则是大脑,最终决定了汽车的前行方向与速度。而“眼睛”则起到了十分关键的作用:收集第一手数据以供分析判断。
在这些“眼睛”中,摄像头相对较简单。它的优点很突出:精度高,距离远,直观方便;可是缺点也同样突出:受到天气的影响太大。而车载雷达,则有着突出的特点和优势。他们比超声波探测器以及计算机视觉设备有着更高的实时性、精度和可靠性。其中,主要研究集中在毫米波雷达和激光雷达上
毫米波指波长介于1~10mm的电磁波,毫米波雷达则指工作在毫米波波段的雷达。毫米波的波长介于厘米波和光波之间,因此毫米波兼有微波制导和光电制导的优点。使用在汽车上时其抗环境干扰能力强,可以满足车辆对全天气候的适应性的要求。并且毫米波本身的特性,决定了毫米波雷达传感器器件尺寸小、重量轻等特性,弥补了摄像头等传感器的缺点,使得其在车载应用方面有着很大的优势。
目前国内外主流汽车毫米波雷达频段为24GHz(用于短中距离雷达,15-30米)和77GHz(用于长距离雷达,100-200米)。这类应用在欧美日汽车已经普及化,目前这些地区几乎所有的汽车均开始配备汽车毫米波雷达传感器,其中包括汽车防撞雷达、汽车盲区检测雷达等。

可是即便如此,毫米波雷达却仍然存在着精度低、可见范围短的特点。而这两个缺陷放在自动驾驶中,却差之毫厘谬以千里,极易引起事故。因此在这样的背景下,升级版就应运而生——激光雷达。
雷达(radar)图
先认识这个坐标图

第二步,计算坐标值
X轴:


以上是关于激光雷达和毫米波雷达的主要内容,如果未能解决你的问题,请参考以下文章
自动驾驶技术-环境感知篇:激光雷达毫米波雷达超声波雷达相关技术介绍
自动驾驶技术-环境感知篇:激光雷达毫米波雷达超声波雷达相关技术介绍
自动驾驶技术-环境感知篇:激光雷达毫米波雷达超声波雷达相关技术介绍