camera-lidar-radar基于卡尔曼滤波和扩展卡尔曼滤波的相机激光雷达毫米波雷达多传感器后融合
Posted 踟蹰横渡口,彳亍上滩舟。
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了camera-lidar-radar基于卡尔曼滤波和扩展卡尔曼滤波的相机激光雷达毫米波雷达多传感器后融合相关的知识,希望对你有一定的参考价值。
【camera-lidar-radar】基于卡尔曼滤波和扩展卡尔曼滤波的相机、激光雷达、毫米波雷达多传感器后融合
代码下载地址(C++ and Python):下载地址
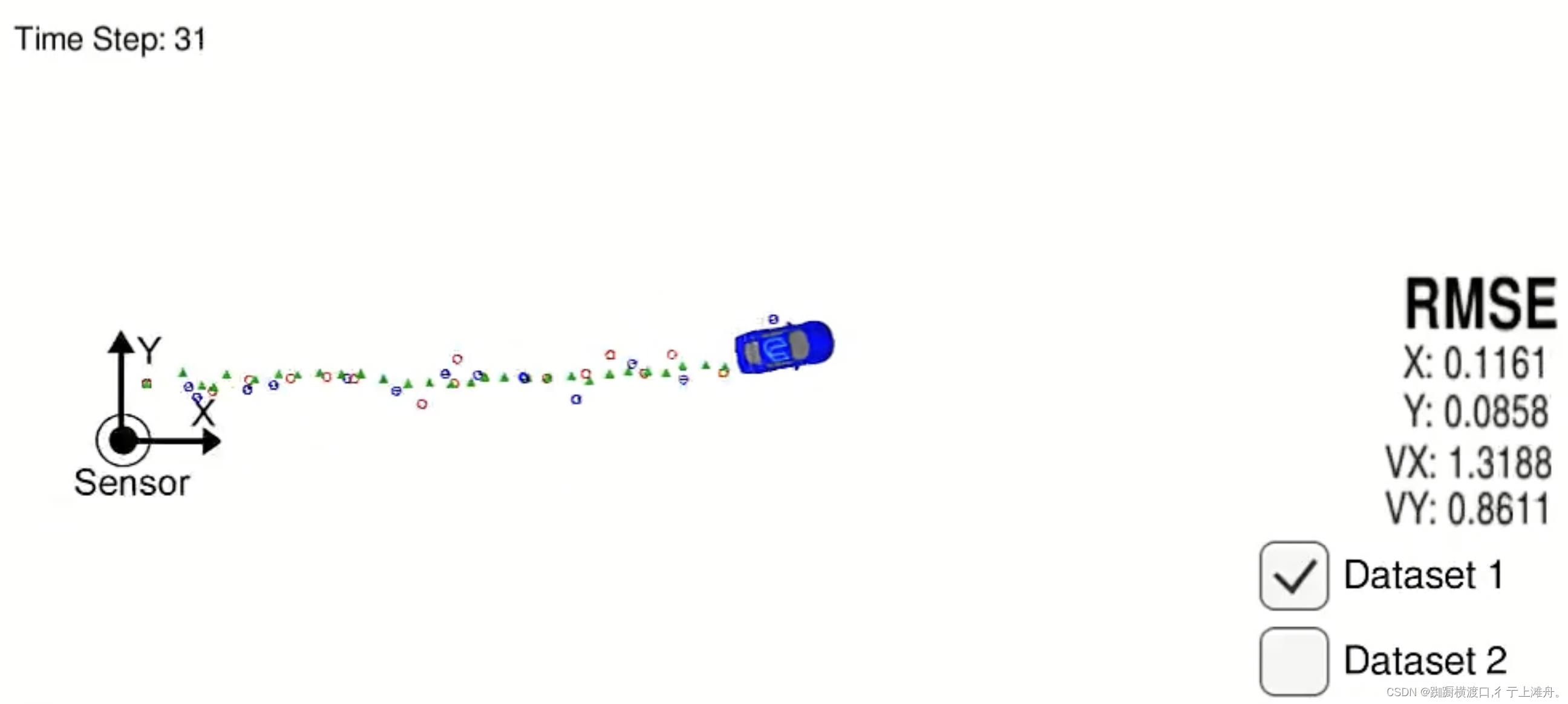
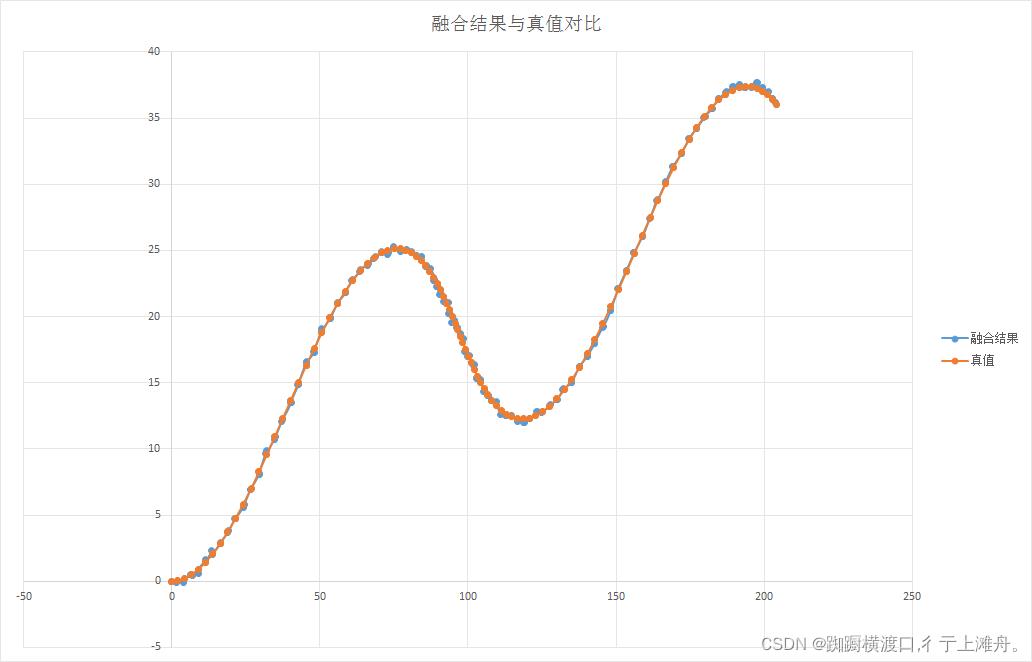
红点和蓝点分别表示radar和lidar的测量位置,绿点表示多传感器融合后的输出结果,真值为小车所在的位置
毫米波雷达核心公式:
以上是关于camera-lidar-radar基于卡尔曼滤波和扩展卡尔曼滤波的相机激光雷达毫米波雷达多传感器后融合的主要内容,如果未能解决你的问题,请参考以下文章