西门子PLC中啥叫PID指令啊?
Posted
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了西门子PLC中啥叫PID指令啊?相关的知识,希望对你有一定的参考价值。
请问有谁能告诉我PID指令是什么意思?
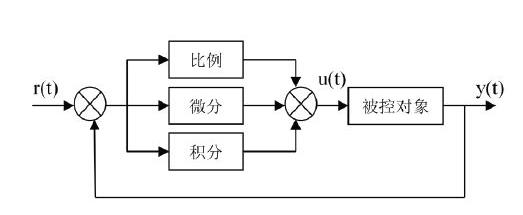
PID(比例+积分+微分)算法控制。
PID回路指令,对模拟量进行PID控制十分方便。PID指令使用的算法:( n SP 为第n个采样时刻的给定值,n为过程变量值,MX 为积分项值)PID 指令根据表格(TBL)中的输入和配置信息对引用LOOP执行PID 循环计算。
在实际控制过程中,无论是给定量还是过程量都是工程实际值,它们的取值范围都是不相同的。因此在进行PID运算前,必须将工程实际值标准化。PLC 在对模拟量进行PID运算后,对输出产生的控制作用是在[0.0,1]范围的标准值,不能驱动实际的驱动装置,必须将其转换成工程实际值。
扩展资料
PID的特点
1、PID应用范围广
虽然很多工业过程是非线性或时变的,但通过对其简化可以变成基本线性和动态特性不随时间变化的系统,这样PID就可控制了。
2、PID参数较易整定
也就是,PID参数Kp,Ti和Td可以根据过程的动态特性及时整定。如果过程的动态特性变化,例如可能由负载的变化引起系统动态特性变化,PID参数就可以重新整定。
3、PID控制器在实践中也不断的得到改进
PID在控制非线性、时变、耦合及参数和结构不确定的复杂过程时,工作得不是太好。最重要的是,如果PID控制器不能控制复杂过程,无论怎么调参数都没用。
参考资料来源:百度百科—PID控制
参考技术A PID指比例积分微分,Proportion比例,Integration积分,Differentiation微分西门子PLC编程软件中有PID向导,程序中的PID程序块可利用s7-Micro/win程序中的“工具”→“指令向导”生成。根据向导的提示可以对死区、报警、手动等功能进行选择,可以对设定范围、P、I、D等参数进行设定(完成后还可以利用向导进行更改)。根据提示完成设定后会自动生成一个子程序和一个中断程序,在主程序或其他程序中调用PID子程序就可以实现PID调节功能。需要更详细的说明可以直接察看编程软件的帮助文档,那里说明的还是比较详细的。
PID控制说明:
在工程实际中,应用最为广泛的调节器控制规律为比例、积分、微分控制,简称PID控制,又称PID调节。PID控制器问世至今已有近70年历史,它以其结构简单、稳定性好、工作可靠、调整方便而成为工业控制的主要技术之一。当被控对象的结构和参数不能完全掌握,或得不到精确的数学模型时,控制理论的其它技术难以采用时,系统控制器的结构和参数必须依靠经验和现场调试来确定,这时应用PID控制技术最为方便。即当我们不完全了解一个系统和被控对象,或不能通过有效的测量手段来获得系统参数时,最适合用PID控制技术。PID控制,实际中也有PI和PD控制。PID控制器就是根据系统的误差,利用比例、积分、微分计算出控制量进行控制的。
比例(P)控制 :比例控制是一种最简单的控制方式。其控制器的输出与输入误差信号成比例关系。当仅有比例控制时系统输出存在稳态误差。
积分(I)控制 :在积分控制中,控制器的输出与输入误差信号的积分成正比关系。对一个自动控制系统,如果在进入稳态后存在稳态误差,则称这个控制系统是有稳态误差的或简称有差系统。为了消除稳态误差,在控制器中必须引入“积分项”。积分项对误差取决于时间的积分,随着时间的增加,积分项会增大。这样,即便误差很小,积分项也会随着时间的增加而加大,它推动控制器的输出增大使稳态误差进一步减小,直到等于零。因此,比例+积分(PI)控制器,可以使系统在进入稳态后无稳态误差。
微分(D)控制 :在微分控制中,控制器的输出与输入误差信号的微分(即误差的变化率)成正比关系。 自动控制系统在克服误差的调节过程中可能会出现振荡甚至失稳。其原因是由于存在有较大惯性组件(环节)或有滞后组件,具有抑制误差的作用,其变化总是落后于误差的变化。解决的办法是使抑制误差的作用的变化“超前”,即在误差接近零时,抑制误差的作用就应该是零。这就是说,在控制器中仅引入“比例”项往往是不够的,比例项的作用仅是放大误差的幅值,而目前需要增加的是“微分项”,它能预测误差变化的趋势,这样,具有比例+微分的控制器,就能够提前使抑制误差的控制作用等于零,甚至为负值,从而避免了被控量的严重超调。所以对有较大惯性或滞后的被控对象,比例+微分(PD)控制器能改善系统在调节过程中的动态特性。
西门子PID各参数的解释
COM_RST :=初试化
MAN_ON :=手动
PVPER_ON:=过程变量外设接通
P_SEL :=比例分量接通
I_SEL :=积分分量接通
INT_HOLD:=积分分量保持
I_ITL_ON:=积分分量初始化接通
D_SEL :=微分分量接通
CYCLE :=采样时间
SP_INT :=内部设定值
PV_IN :=过程变量输入
PV_PER :=过程变量外设输入
MAN :=手动值
GAIN :=比例增益
TI :=复位时间
TD :=微分时间
TM_LAG :=微分分量的滞后时间
DEADB_W :=死区宽度
LMN_HLM :=被控量上限
LMN_LLM :=被控量下限
PV_FAC :=过程变量系数
PV_OFF :=过程变量偏移量
LMN_FAC :=被控量系数
LMN_OFF :=被控量偏移量
I_ITLVAL:=积分分量初始值
DISV :=干扰变量
LMN :=被控量
LMN_PER :=被控量外设
QLMN_HLM:=被控量上限值到达
QLMN_LLM:=被控量下限值到达
LMN_P :=比例分量
LMN_I :=积分分量
LMN_D :=微分分量
PV :=过程变量
ER :=误差信号本回答被提问者采纳 参考技术B 好像是s_otd吧?这个是西门子的延时接通计时器指令,一般都是指令上测都是填t1-t255,不能是别的
预设值时间应该是s5#time
2s等格式的。一般在多重调用的功能块是不能用这个指令的,都用ton(库文件里边的)。因为这个是系统固有的定时器,好像只有255个!慎用!! 参考技术C 您是不懂PID的含义吗?
PID是一种闭环控制方式。P代表比例调节,影响系统的快速性;I代表积分调节,消除系统的稳态误差;D代表微分调节,对系统的状态有一个预测的作用(一般不用,条不好的话会造成系统震荡)。
我不知道您说的PLC是S7-300吗?它是调用FB41实现PID的。
希望我的解释对您有所帮助 !
以上是关于西门子PLC中啥叫PID指令啊?的主要内容,如果未能解决你的问题,请参考以下文章
用西门子200的PLC 自己写个PID控制程序,怎么写啊, 求代码,