一场没有先例的自动驾驶算法大赛,出结果了
Posted QbitAl
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了一场没有先例的自动驾驶算法大赛,出结果了相关的知识,希望对你有一定的参考价值。
贾浩楠 发自 凹非寺
量子位 | 公众号 QbitAI
自动驾驶领域没有先例的一场挑战赛,刚刚出结果。
1067支队伍,整3个月时间主要在自动驾驶卡车、干线物流和自动驾驶轿车、城市道路双赛道场景下角逐。这也或是国内首次有干线物流赛道入赛,覆盖AEB紧急制动、跟车、变道、匝道汇入等8类典型高速场景。
参赛选手需提交自动驾驶规控算法,在真实场景条件下利用有限资源,规划一条安全光滑的轨迹,无碰撞、高效、舒适通行,到达指定目标区域。
 △获奖选手在颁奖会分享方案
△获奖选手在颁奖会分享方案
不过,竞赛科目既非热门的感知算法,聚焦领域也是少在赛场上出现的自动驾驶卡车,赛题内容更不是常见经典数据库,甚至对成绩的评判标准也不单看算法性能上限。
非主流非传统,但它依然吸引了全球范围来自200多所高校和60多家企业单位的选手参与。
成绩优异的前五名,按照主办方自动驾驶专家的评价,都拿出了“让人眼前一亮”的方案。
比赛本身具有独特性针对性,连同它出人意料的参与热度,和涌现出的优秀选手,结合自动驾驶卡车商业落地如火如荼,这样的大赛出现似乎恰如其分。
挑战赛产出了哪些成果?
大赛从9月1日开启,11月16日是代码提交的最后期限。
AB两榜共38个场景,难度各异,综合高速和城市道路场景。
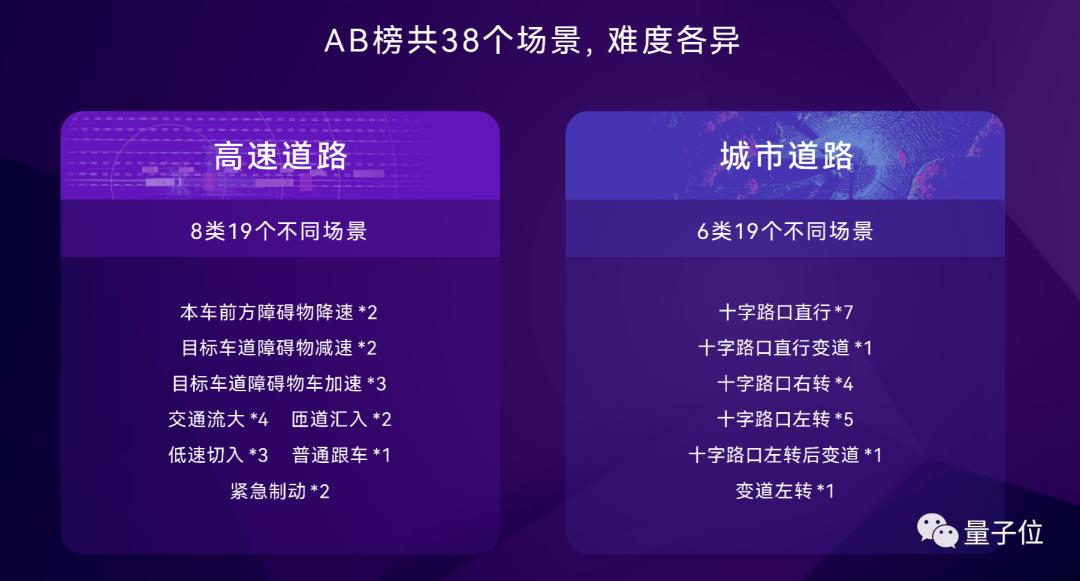
本车的传感器方案和道路环境数据由主办方统一提供,是不变量。参赛选手需要做的是以传感器输入数据作为决策依据,为本车规划出一条到达目的地合理的路线。同时还需要保持行驶的平稳性、安全性。
其中一个最为典型,也是自动卡车量产中关注的焦点的题目是高速匝道汇入。
这样的场景下,自动驾驶卡车面临的挑战主要有道路上不断变化的车道线、其他交通参与者,以及重卡独有的车身长,系统反应慢的特点。
在任务规划已经明确(比如成功汇入匝道)的情况下,参赛选手需要解决的主要问题有两个:
行为规划:按照任务规划的目标和当前的实时情况(其他的车辆和行人的位置和行为、车道线、交通标识等等),作出下一步车辆应该执行的决策。简单说就是系统决定是跟车还是超车,是加速变道还是减速避让。
执行系统:充分考虑半挂车自身尺寸和响应速度,决定纵向(油门刹车)、横向(转向)维度的具体执行方法,保证安全。
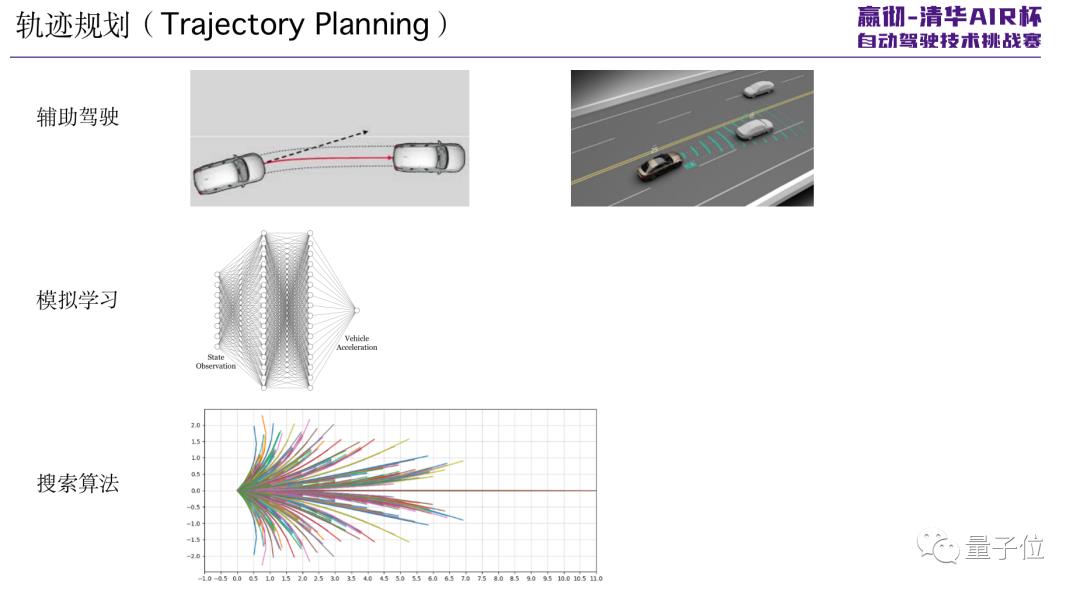
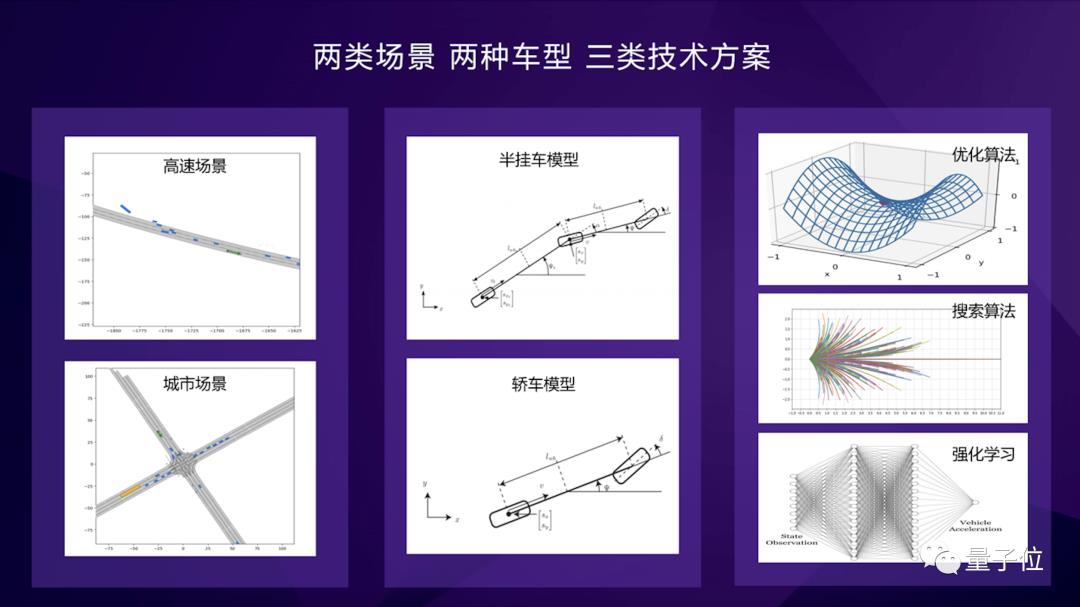
规划决策一般有3类baseline算法,分别是基于优化的、基于搜索的,以及基于强化学习的,参赛选手可以任选,也可以创新方案。
场景数据则来自于国内最大的自动驾驶高速场景库,全部取自真实道路。

单个场景赛题的评判分数分为两部分:
可行性分数和路径代价分数, 两者各占50%。比赛的测评成绩为所有场景的加权和,每个场景的权重按赛题难度划分。
可行性是考察选手提交算法在当前任务中是否具备基本的安全性、合理性。而路径代价考察的则是算法执行过程中占用的计算资源、行车的平稳性、路径的优化程度等等。
这样的赛题设置最大特点是场景细化,条件特化,但可采用多种方法。
八仙过海各显神通,比如大赛冠军队,来自美国加州大学戴维斯分校和普渡大学的团队。

自动驾驶规控算法常用的3种baseline更多着眼于与控制算法模块连接紧密的轨迹规划,但自动驾驶尤其是规范道路上的自动驾驶(robotaxi以及自动驾驶卡车),面临的最大挑战是与上层模块的交互以及决策的正确与否。
他们独树一帜用Xbox控制器采集了多个成熟卡车驾驶者的驾驶习惯和不同场景处理方法,直接将这些“老司机”的数据拿来训练神经网络,让其掌握半挂车加速度的控制方法,然后再配合LCA(Lane Centering Assist 车道导正辅助系统)完成轨迹规划,解决规划问题。
这是一种创新的辅助驾驶+深度模拟学习+搜索算法的综合解决方法。
赛事主办方的资深自动驾驶工程师称这种方案“眼前一亮”,理论上提供了一种更加可靠,失误率更低的规划决策算法开发思路。
其他获奖选手的解题方案也各具特色,分别采用了双向搜索和贪心算法、搜索算法的空间剪枝、凸优化方案、深度强化学习PPO算法求解等丰富解题方法。
为什么比规控?要解决什么问题?
之前,自动驾驶最受关注的部分是感知识别,外界几乎绝大部分对自动驾驶的关注,也都在感知模块上。
各种各样的自动驾驶挑战赛,多脱胎于以往的计算机视觉大赛,即在统一的数据集上比不同算法的识别率、准确度。
规划控制,一方面受限于产业落地进展,没有相关数据集;另一方面也没有实力玩家能够振臂一呼。
于是这次大赛,聚焦在自动驾驶规控——具体到卡车领域更是独一个。
为什么聚焦这个环节?对于自动驾驶卡车来说,规控意味着什么?
第一个问题的答案再简单不过:
规控是自动驾驶最重要的模块之一,不是没有挑战,而是比感知难度更大。
感知识别层面,通常是泾渭分明的好与不好,成功识别和识别失败,更容易被认知,被量化。
但规控不同,完成同一个目标伴随着预测、决策、路径规划、控制等不同环节,其中最困难的是如何做决策。
主要技术难点在于对其他交通参与者的行为进行预测,并和他们进行博弈,保证自动驾驶系统的安全和效率。预测未来的难度超越感知当下,上升到系统对真实世界的驾驶行为的建模层面。
每个环节都有数种不同的方案可选,带来的是驾驶风格激进与否、行驶是否平顺、容错空间是否足够等等实际能力的差别。规控是评判一个自动驾驶系统是否好用、敢不敢用的核心。
当然,规控环节的任何毫厘之失,也会造成整个系统的失效。所以与感知识别“0与1”的特征不同,规控算法是藏在细节的魔鬼。
自动驾驶卡车应用于干线物流,是一个唯成本说话的行业,其中包括车辆成本、人工费、燃油费、货物损耗等等。
优秀的规控算法能尽量保持卡车平稳行驶,选择最短路径的同时,减少急加速急减速,降低油耗;在通过颠簸坑洼路面时,合理的规控算法也能最大程度减少货箱收到的冲击,减少运输损耗;以及使驾驶更轻松,降低人力。
事实上,自动驾驶卡车,尤其是半挂车的规控算法在这个赛道内一直是一个热门研究,也被视为商用无人车区别于乘用无人车的核心技术所在。
一个C本人类驾驶员,是开不了B本A本卡车的,对于AI司机来说同理。
因为卡车的车身惯性更大、车身响应更迟钝,首先就对控制系统提出很高的要求。
最关键的是半挂车与车头属于非刚性连接,导致整个车身的力学特性、对路况的反馈姿态完全不同,规划决策层面要考虑更多更复杂的参数,对周围其他目标的关注、预测能力要求,也比乘用车高得多。
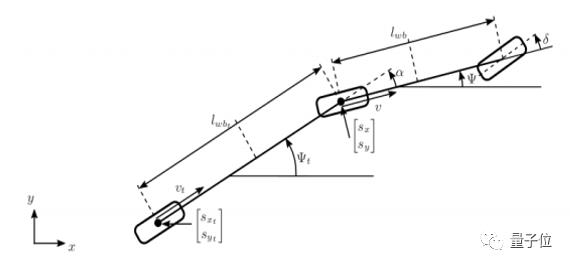
△半挂车模型
自动驾驶业内第一个规控算法大赛,明确锚定智能卡车赛道,体现的是最核心最原始的诉求:
以安全和成本的平衡作为基本评判原则,解决的自动驾驶卡车落地面临的现实问题。
如何评价比赛?
聚焦自动驾驶卡车、干线物流,并首次以规控算法作为核心;另外,赛题设置和评判规则,都从“量产落地”原则出发——没有海量的真实道路测试数据,以及长期面向量产落地研发经验,是难以支撑主办这样一场大赛的。

作为国内率先落地量产和开启自动驾驶卡车干线运营的自动驾驶企业,嬴彻科技,目前商业运营范围覆盖50多条高速,自动驾驶商业运营里程已超1800万公里,已经积累出国内最大的自动驾驶高速场景库。
嬴彻科技赛事工作组表示,规控算法之前少有公开研究,门槛不低,但本身却是自动驾驶卡车落地量产中的难点。
这样的领域,需要有能与商业进展相匹配,而且能双向促进的技术大赛,比赛最终报名队伍数也大大超过开始前的预测,选手们的硬核实力和精彩解题方案也令人深受鼓舞。
这是比赛独特性和稀缺性的最好证明。
近年来,行业正达成共识,整个赛道走到了一个重要分水岭:
靠Demo秀肌肉分高下阶段结束了,“量产为纲,解决实际问题”成为了当下的主要任务。
将技术赛事带入与产业最前沿的进展同步,也正是本次大赛的重要意义。
最后,优秀参赛选手方案已经为你整理好,微信里回复“大赛”获取。

赛题中高速道路场景数据由嬴彻科技提供,城市道路场景数据由清华AIR与百度提供。
— 完 —
点这里关注我 👇 记得标星噢 ~
以上是关于一场没有先例的自动驾驶算法大赛,出结果了的主要内容,如果未能解决你的问题,请参考以下文章