第十八届全国大学生智能车竞赛各组别竞赛内容规划第二版本-核心专家组讨论稿
Posted 卓晴
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了第十八届全国大学生智能车竞赛各组别竞赛内容规划第二版本-核心专家组讨论稿相关的知识,希望对你有一定的参考价值。

01 比赛建议
如下建议,汇总了来自参赛同学、老师各个方面的意见。
- 车模自制:
车模自制能更大程度上激发大家的创造力,但却和公平有互斥的关系,普通竞速组如果不统一平台,的确会让砸钱党有更好的起点和更高的上限,除非这个组别的车模自制带来的优势是刚好被限制住的,或者说花巨资自制也起不到关键作用和决定性作用的任务,这样的任务条件下允许车模自制就非常合适,比如以前的纯节能组可以车模自制;车模的使用可能也需要考虑现有车模都依然能用得上,避免部分学校之前购买的某些类型车模在今年的比赛中就用不上了。 - 赛道设计:
去掉三叉,各室内赛道要求应当追求统一,方便同学校不同组别的参赛同学们布置场地,正式比赛场地的设置希望能更多元化且便于布置,近几年的赛道过于简单,对循迹算法的考核很少了; - 比赛设备:
竞赛场地内所涉及到的设备尽量来源、标准统一。免出现今年这样的情况,比赛设备也尽量做到免费供应给参赛学校使用; - 比赛芯片:
各组别最好不出现各赞助单位的芯片交叉情况; - 下载代码:
所有参赛队请提前增加人机交互的设计,现场不允许下载代码,参数的调试,策略的选择可以通过设计在小车上的人机交互进行调整,且比赛模式改为限时限次的方式,如果已经取得了5次有效成绩,便结束当前队伍的比赛,从5次成绩中的最好成绩作为最终成绩即可;
02 竞赛内容
如下是对第十八届智能车竞赛各个组别比赛内容的进一步细化。
| 序号 | 组别 | 比赛任务 | 比赛环境 | 车模 | 微控制器 | 备注 |
|---|---|---|---|---|---|---|
| 1 | 负压电磁组 | (1)在给定的传统PVC赛道上完成两周运行; (2) 允许使用电磁、红外光电、姿态传感器、超声传感器器件进行赛道和环境检测。 (3)允许增加额外的电机,驱动风扇为车模提供负压;额外电机数量不超过两个,额外电机允许使用有刷、无刷等各类电机,不做限制,但电机驱动电路模块需自制,无刷驱动主控需要使用STC的主控完成; | (1)室内标准赛道,铺设有电磁线; (2)赛道具有断路,路障,坡道等元素 | 自制车模 | STC8XX STC16XX STC32XX | |
| 2 | 专科四轮组 | (1)比赛任务与负压电磁组相同; (2)限定专科学校学生参赛; (3)传感器允许线性CCD、电磁、红外光电,IMU,超声等器件进行赛道和环境监测。 | 室内标准赛道 | B,C | STC8XX STC16XX STC32xx | |
| 3 | 极速越野组 | (1) 依靠GPS,摄像头,IMU导航在100米直线跑道上完成往返运行; (2)先跑100米直道,直道中央有坡道如果绕行,加罚5秒。 (3)返回过程中设置锥桶,小车完成连续穿越锥桶形成S路径,或者绕行锥桶,形成圆环路径; (4)允许使用无刷电机为车模提供驱动,无刷不限制型号,但无刷电机的驱动电路模块需自制且限定使用英飞凌AURIX TC系列MCU制作无刷驱动方案; | (1)室外操场的100米直线跑道;或者其他能满足100米直线距离的宽度足够的场地。 (2)有坡道,锥桶等辅助道路元素; | L | Infineon | |
| 4 | 室外单车组 | (1)依靠GPS,摄像头,IMU导航在100米直线跑道上完成往返运行; (2)先跑100米直道,中间设置有坡道;然后从另外半边折返,返回过程中设置连续锥桶,小车完成连续穿越锥桶,形成S赛道;或者绕行锥桶形成圆环赛道; (3)允许使用动量轮或动量杆辅助保持车体平衡,动量轮允许使用无刷电机驱动,无刷电机不限制型号,动量杆允许使用额外的舵机或电机进行控制且不限制型号,若使用了无刷电机,则无刷电机的驱动电路模块需自制且限定使用沁恒MCU制作无刷驱动方案; | (1)与极速越野组相同; | K、N | WCH CH32V307 CH32V203 | |
| 5 | 声音信标组 | (1)由充电线圈与扬声器组成声音+电磁信号导航的信标; (2)车模需自行从线圈获取电能;并依据声音,电磁,GPS信号的引导完成信标遍历; (3) 要求使用英飞凌硅麦传感器完成对声音信号的检测; | (1) 室外开阔场地 (2)大于8m×8m即可。 | 自制 | Infineon | |
| 6 | 经典摄像头组 | (1)在给定的传统PVC赛道上完成两周运行; (2) 赛道中存在断路、横断路障; (3)摄像头限高15厘米; (4)允许使用各类红外光电、摄像头、电磁、激光、姿态传感器、超声传感器器件进行赛道和环境检测。 | 室内标准赛道; | F、G | Infineon | |
| 7 | 电能接力组 | (1)需要设计两辆车模,救援车与被救援车; (2)救援车通过电池供电,被救援车通过无线接收电能存储于超级电容供电。 (3)救援车从车路出发,行驶到被救援车的位置通过无线电能传输的方式将电能传输给被救援车; (4)被救援车提前靠右放置在车库左右三米之内的区域; (5)救援车行驶到该位置时自动找位置给被救援车充电; (6)从被救援点开始,两辆车模在给定的传统PVC赛道上完成两周跟随运行,救援车在前,被救援车在后;两者之间不能形成物理接触。 (7)完成两周运行后救援车通过斑马线后停在赛道上,被救援车停进车库; (8)车载传感器不限制; | 室内标准赛道; | (1)救援车:B、C (2)被救援车:允许自制 | MM32 MM32F5270 MM32F0140 | |
| 8 | 独轮平衡组 | (1)在给定的传统PVC赛道上完成两周运行; (2) 赛道中存在断路、横断路障; (3)允许使用各类红外光电、摄像头、电磁、激光、姿态传感器、超声传感器器件进行赛道和环境检测。 (4) 外观增加灯光秀展示其运行稳定与优雅; | 室内标准赛道 | Infineon | ||
| 9 | 智能视觉组 | (1)从去年的动物、水果、交通工具检查变为农作物目标检测与搬运,数据集会做全面的更新。 (2)赛场中存在已知位置的目标和未知位置的目标,坐标纸上的目标只含有已知目标的位置,未知位置的目标需要智能车完成目标的位置检测和内容识别,随机摆放目标的数量大约占总目标数量的1/3到2/3; (3)可增加人机交互或多车协同来辅助完成任务。人机交互主要依靠语音交互实现,语音交互允许参赛队员 在场外通过蓝牙语音传递 控制车模运行和执行动作。 要求是不允许使用 成品的语音模块, 必须使用恩智浦单片机 自行完成语音检测识别; (4)多车协同即允许制作多个车模协同作业,但多个车模不是一模一样的车模。 而是可以协同搬运的车模,就像联合收割机和搬运机那样。 (5)在目标识别搬运过程中, 识别与搬运是主车的任务, 另外可以允许使用多个辅助车模, 完成将目标板搬运到储存仓库内。 多车协同搬运和人机交互, 是可选的内容, 以提高比赛效率; | 室内5×7场地 | H、M | NXP RT1064 RT1170 | |
| 10 | 完全模型组 | (1)在标准赛道的基础上,利用赛道内的空地形成农田耕作场景; (2)车辆在赛道与农田内的行进; (3)利用视觉模型解决道路与作物识别等任务; | 在标准赛道内增加辅助元素。 | I车模 | EdgeBoard+MM32 |
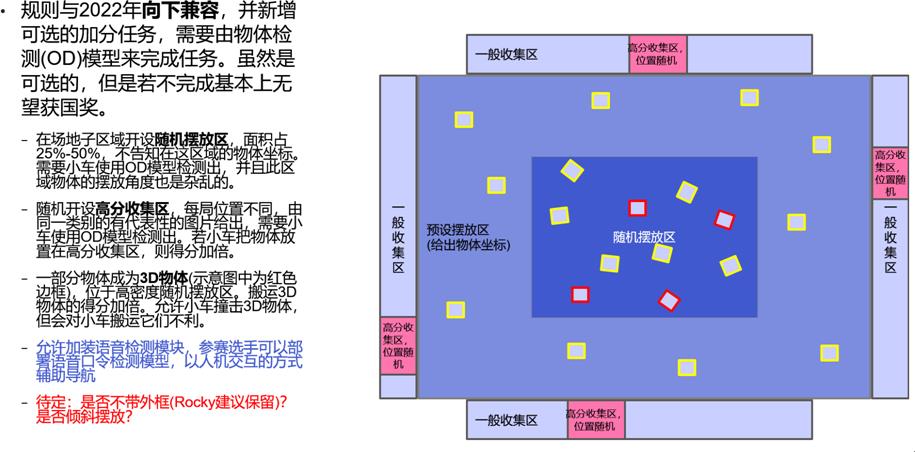
▲ 图2.1 视觉组场地示意图
以上是关于第十八届全国大学生智能车竞赛各组别竞赛内容规划第二版本-核心专家组讨论稿的主要内容,如果未能解决你的问题,请参考以下文章