最优化简介-第三节:最优化基本概念
Posted 快乐江湖
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了最优化简介-第三节:最优化基本概念相关的知识,希望对你有一定的参考价值。
文章目录
一:最优化研究基本过程
最优化研究基本过程:一般来说,最优化算法研究可以分为如下几步
- 构造最优化模型:模型的构造和实际问题相关
- 确定最优化问题的类型:之所以要分类是因为不存在一个统一的算法可以适用于优化问题
- 设计算法
- 实现算法
二:全局最优解和局部最优解
定义:对于可行点 x ‾ ( x ‾ ∈ χ ) \\overlinex(\\overlinex\\in \\chi) x(x∈χ),定义如下概念
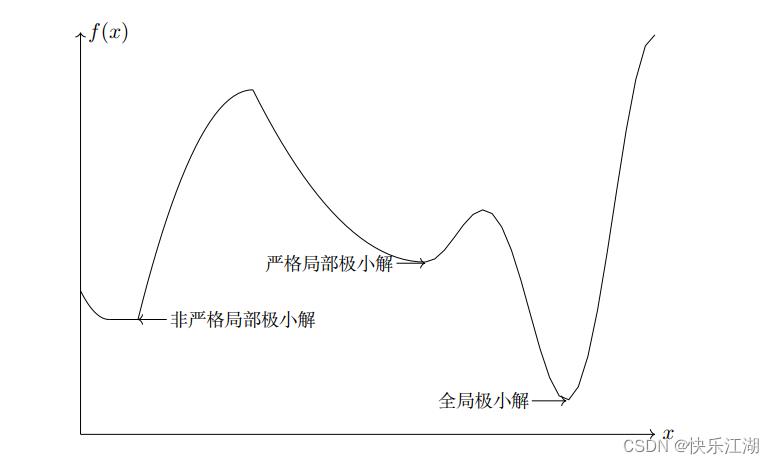
- 若 ∀ x ∈ χ \\forall x\\in\\chi ∀x∈χ,都有 f ( x ‾ ) ≤ f ( x ) f(\\overlinex)\\leq f(x) f(x)≤f(x),那么称 x ‾ \\overlinex x为全局最优解
- 如果存在 x ‾ \\overlinex x的一个 ξ \\xi ξ领域 N ξ ( x ‾ ) N_\\xi(\\overlinex) Nξ(x)使得 f ( x ‾ ) ≤ f ( x ) f(\\overlinex)\\leq f(x) f(x)≤f(x),那么称 x ‾ \\overlinex x为局部最优解;进一步如果有 f ( x ‾ ) < f ( x ) f(\\overlinex)< f(x) f(x)<f(x)且 x ≠ x ‾ x\\not= \\overlinex x=x成立,则称 x ‾ \\overlinex x为严格局部最优解
三:优化算法
(1)迭代算法
迭代算法:由于实际问题的复杂性,所以我们在求解时往往只能够得到其局部最优解,而不能得到全局最优解,所以我们常常会使用迭代算法。其基本思想为:从一个初始点 x 0 x^0 x0出发,按照某种给定的规则进行迭代,得到一个序列 x k \\x^k\\ xk
- 如果迭代在有限步内终止,那么最后一个点就是优化问题的解
- 如果迭代点列是无穷集合,那么希望该序列的极限点为优化问题的解
(2)收敛问题
收敛问题:在算法设计中,还需要考虑算法产生的点列是否收敛到优化问题的解。考虑无约束情形,对于一个算法,给定初始点 x 0 x^0 x0,记算法迭代产生的点列为 x k \\x^k\\ xk
- 如果 x k \\x^k\\ xk在某种范数的意义下满足 l i m k − > ∞ ∣ ∣ x k − x ∗ ∣ ∣ = 0 lim_k->\\infty||x^k-x^*||=0 limk−>∞∣∣xk−x∗∣∣=0,且收敛的点 x ∗ x^* x∗为一个局部(全局)极小解,那么我们称该点列收敛到局部(全局)极小解,相应算法称为是依点列收敛到局部(全局)极小解的
- 如果从任意初始点 x 0 x^0 x0出发,算法都是依点列收敛到局部(全局)极小解的。记对应的函数值序列为 f ( x k ) \\f(x^k)\\ f(xk),可以定义算法的(全局)依函数值收敛到局部(全局)极小值概念
注意
- 对于凸优化问题,因为其任何局部最优解都是全局最优解,所以算法的收敛性都是相对于全局极小而言的
- 除了点列和函数值的收敛外,实际中常用的还有每个迭代点的最优性条件的收敛
- 对于带约束的情形,给定初始点 x 0 x^0 x0,算法产生的点列 x k \\x^k\\ xk不一定是可行的。考虑到约束违反的情形,我们需要保证 x k \\x^k\\ xk在收敛到 x ∗ x^* x∗的时候,其违反度是可以接受的。除此之外,算法的收敛性定义和无约束情形相同
(3)算法的渐进收敛速度
Q Q Q-收敛速度:设 x k \\x^k\\ xk为算法产生的迭代点列且收敛于 x ∗ x^* x∗
- Q-线性收敛: 对充分大的 k k k有, ∣ ∣ x k + 1 − x ∗ ∣ ∣ ∣ ∣ x k − x ∗ ∣ ∣ ≤ a \\frac||x^k+1-x^*||||x^k-x^*||\\leq a ∣∣xk−x∗∣∣∣∣xk+1−x∗∣∣≤a, a ∈ ( 0 , 1 ) a\\in(0,1) a∈(0,1)
- Q-超线性收敛: 对充分大的 k k k有, l i m k − > ∞ ∣ ∣ x k + 1 − x ∗ ∣ ∣ ∣ ∣ x k − x ∗ ∣ ∣ = 0 \\mathoplim_k->\\infty\\frac||x^k+1-x^*||||x^k-x^*||= 0 limk−>∞∣∣xk−x∗∣∣∣∣xk+1−x∗∣∣=0
- Q-次线性收敛: 对充分大的 k k k有, l i m k − > ∞ ∣ ∣ x k + 1 − x ∗ ∣ ∣ ∣ ∣ x k − x ∗ ∣ ∣ = 1 \\mathoplim_k->\\infty\\frac||x^k+1-x^*||||x^k-x^*||= 1 limk−>∞∣∣xk−x∗∣∣∣∣xk+1−x∗∣∣=1
- Q-二次收敛: 对充分大的 k k k有, ∣ ∣ x k + 1 − x ∗ ∣ ∣ ∣ ∣ x k − x ∗ ∣ ∣ 2 ≤ a \\frac||x^k+1-x^*||||x^k-x^*||^2\\leq a ∣∣xk−x∗∣∣2∣∣xk+1−x∗∣∣≤a, a > 0 a>0 a>0
以上是关于最优化简介-第三节:最优化基本概念的主要内容,如果未能解决你的问题,请参考以下文章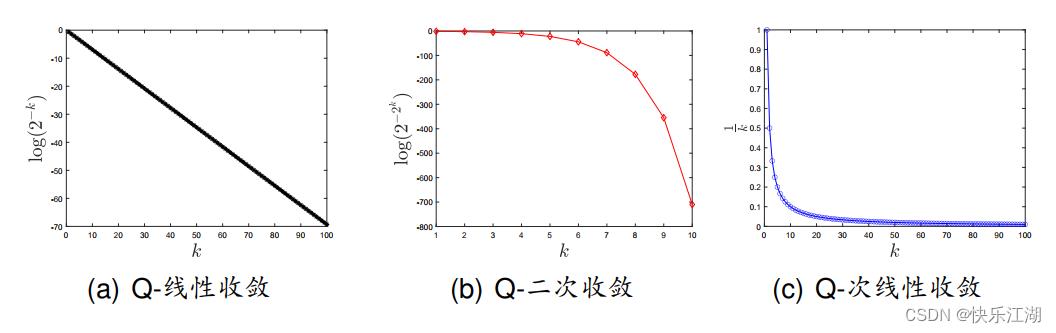
R
R
R-收敛速度:设
x
k
\\x^k\\
xk为算法产生的迭代点列且收敛于
x
∗
x^*
x∗,已定义
R
R
R-线性收敛为例,类似可以定义
R
−
R-
R−超线性收敛和
R
−
R-
R