3D点云处理:平面度|平行度(增加精度的平行度优化)|平面之间的夹角|点到平面的投影点(附源码)
Posted 让让布吉
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了3D点云处理:平面度|平行度(增加精度的平行度优化)|平面之间的夹角|点到平面的投影点(附源码)相关的知识,希望对你有一定的参考价值。
文章目录
1. 平面度
根据最新ISO 12781-2011国际标准,以及与之对应的国家标准《GB/T 24630.1-2009产品几何技术规范(GPS)平面度第1部分》,平面度被定义为实测表面高度距离理想平面的偏差。
理想平面是利用实测数据计算并拟合出的平面,与理想平面平行的上下两个平面在空间内包含所有测量点,这两个平面的最小距离t被称之为公差值。对于3D视觉来说,理想平面则是通过平面拟合算法拟合得到。
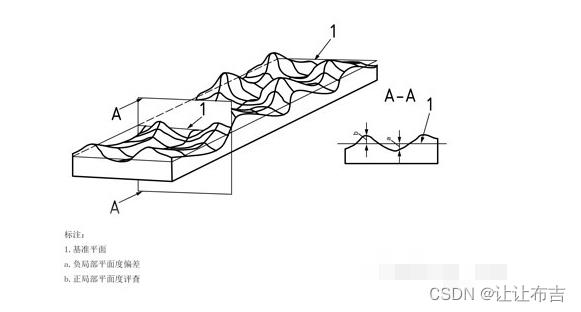
平面度的计算首先需确定理想平面,再以该理想平面作为基准平面计算各测量点到基准平面的绝对距离值,最终取最大值。
- 3D视觉计算流程
- 通过点云拟合平面;
- 计算点到平面的距离,并且进行排序;
- 取绝对最大值作为平面度的度量;
2. 平行度
平行度是一个表面,中心线/面精确地平行于一个基
以上是关于3D点云处理:平面度|平行度(增加精度的平行度优化)|平面之间的夹角|点到平面的投影点(附源码)的主要内容,如果未能解决你的问题,请参考以下文章