机器人设计之一机械设计
Posted NeuralWiki
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了机器人设计之一机械设计相关的知识,希望对你有一定的参考价值。
我参加了两届Robomaster大赛,该机器人大赛是中国四大机器人大赛之一。难度相比之下较低,因为DJI才开始做这个比赛,因此为了推广,所以降低了参赛门槛。

参赛经费门槛:10w
参赛技术门槛:机械设计本科、电控本科(STM32)、图像识别本科及以上、自动控制本科;
有一个热爱机器人的团队;
以上三点具备就可以参加这个比赛了。
接下来我就该车的机械设计从以下几个方面,简单说下我的经验:
底盘,减震,云台,炮台,抓弹等。好的机械设计是成功的前提。该比赛的机械设计很简单。但是要做稳定却不那么容易,底盘和云台有些部件很容易出问题,比如说云台高速摩擦轮很容易就把螺丝震掉。所以这个地方尽可能的增加和云台的接触面积可以减少螺丝脱落的风险。
底盘:底盘包括减震结构,需要做两层底盘,然后衔接在一起,底盘的两片主体可以分块加工,然后连接在一起。其实这个是为了加工方便。也便于后期出问题的时候自主更换。缺点就是增加了不稳定性。我们决定分块设计。设计了这样的六片结构然后靠中间的铁杆连接。
看一下Robocon的机械结构吧。Robocon大量的采用铝合金柱的结构,主要是方便加工易于DIY,方面构架框架结构,尤其是对伸展能力和反应效率要求很高的Robocon更是如此。这种底盘对减震的要求较小。而且也不利于设计减震结构。几乎都可以手工搭建。第二种形式的底盘就是RM的底盘结构。采用六片组合而成,中间用铝柱刚性连接。两侧的对着的铝片中间设计减震结构用于安装电机。主要是

图2 华科Robocup机器人
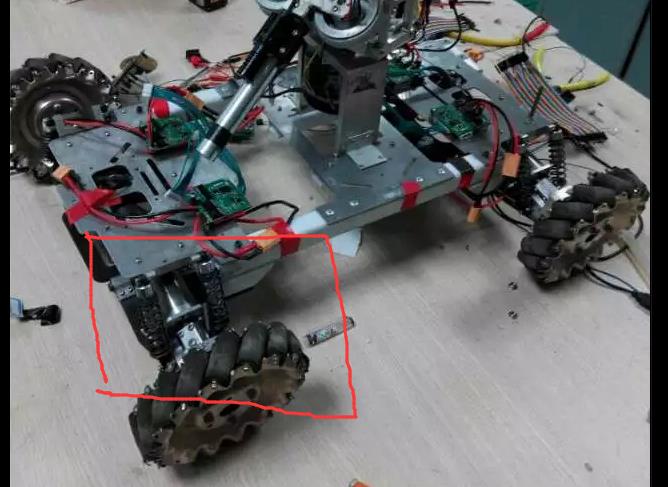
图3 RM减震底盘
先讲一下抓蛋结构:
这个抓蛋结构需要安装在飞行器之下,因此质量一定要尽可能的小,又需要尽可能的抓取尽可能多的蛋。我们在脑海中有两种结构,一种是拦,两片“手臂”揽入高尔夫,这个方案实测效果很好,需要的力矩小,且更稳定。

图3 飞行器抓蛋结构
如图,因为高尔夫球是球体,下面的部分是圆柱。圆柱去接触高尔夫,收揽的时候只需要很小的力量。中间是丝杆,丝杆的运动带动一侧的抓手。用步进电机驱动。接下来有几个TIP需要注意:
1.带动的抓手一次三个连接轴承,其中两个要用滑动轴承减小摩擦,第三个要用螺旋的,且三个连接部分尺寸要尽可能准确,才可以减少摩擦。三角形的结构有利于这一侧跟水平面垂直,不至于发生偏离形变;
2.检测传感器只需要用最简单的限位开关即可,检测到闭合就关闭运动;
3.使用碳纤维、木板、3D打印材料质量要足够轻;
4.学会用三角形结构加固一些直角的连接处。
还有其他的更加复杂的方案。比如说旋转收揽等。但是都不如这个实用稳定。
我们最常使用的是Solidworks和Inventor软件。我更熟悉Inventor ,inventor是一款特别易于上手的软件。
Inventor:
其实只要你学会了使用构建一个平面图形并且做拉伸。你就可以 构建出你想要的结构,并且不会特别复杂。机械设计的难点就是如果把你脑海中的概念,付现到实际的项目中去。
炮台:
炮台的话,主要见过两种结构,一种是这种加特林式的发射结构,发射容量大,不易卡壳,设计简单。只需要做一个旋转拨弹,旋转拨弹部分就是细节了。直接转动整个弹药架很不稳定。所以在这些弹药管下面安装一个旋转结构,讲漏下来的弹药一次波动到发射结构中。发射结构的摩擦轮要足够大。不然带不动高尔夫。第二种结构是那种做一个螺旋上升的水管,优点是一个入弹口,一个出单口,不需要旋转结构。缺点是填弹量小,可能会出现卡壳的现象。

图 炮手
以上是关于机器人设计之一机械设计的主要内容,如果未能解决你的问题,请参考以下文章
ROS机器人底盘(23)-IMU和里程计融合与单独编码器里程计的对比测试
SLAM+语音机器人DIY系列:差分底盘设计——2.stm32主控软件设计
SLAM+语音机器人DIY系列:差分底盘设计——5.底盘PID控制参数整定