图1. 机器人实际测试场景

图2. View of xtion

图3. laser scan (red point)
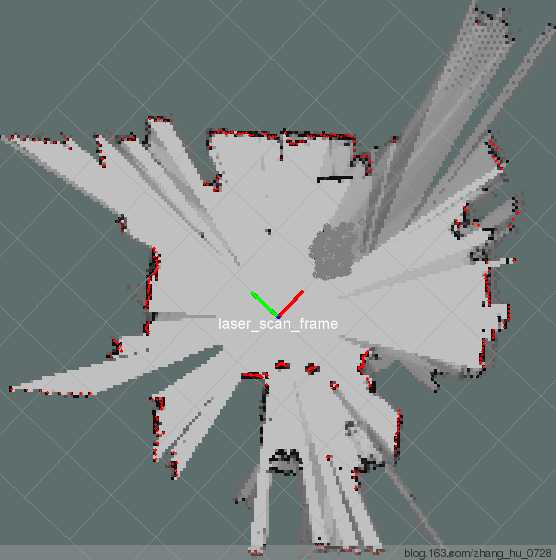
图4. xtion scan (blue point)
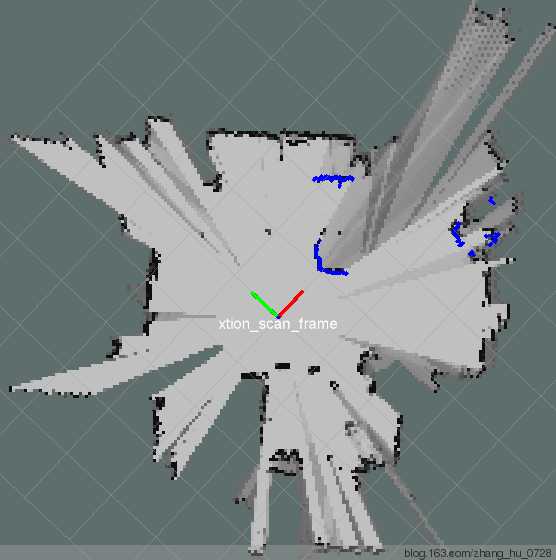
图5. Fuse xtion scan into laser scan (green point)
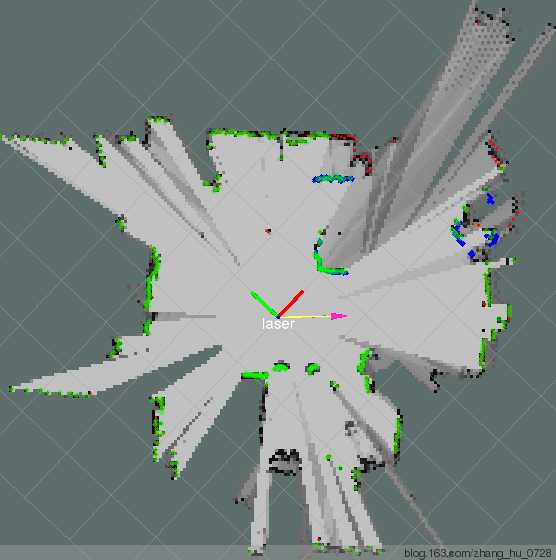
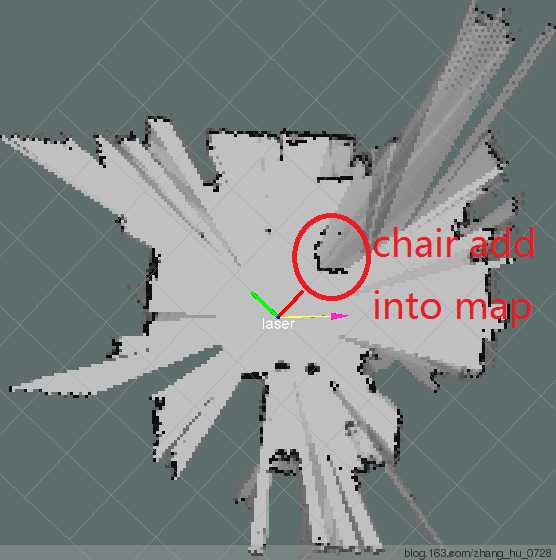
图6. Chair add into map
Posted hiram-zhang
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了xtion与laser数据融合-特殊障碍物检测相关的知识,希望对你有一定的参考价值。
图1. 机器人实际测试场景
图2. View of xtion
图3. laser scan (red point)
图4. xtion scan (blue point)
图5. Fuse xtion scan into laser scan (green point)
图6. Chair add into map
以上是关于xtion与laser数据融合-特殊障碍物检测的主要内容,如果未能解决你的问题,请参考以下文章
ROS机器人底盘(34)-laser_filters的使用(2)-屏蔽车体干扰
2d Laser 和 Odomter 内外参数标定工具原理及使用方法