bundle adjustment原理转载
Posted Tigerwang1218
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了bundle adjustment原理转载相关的知识,希望对你有一定的参考价值。
转自菠菜僵尸 http://www.cnblogs.com/shepherd2015/p/5848430.html
bundle adjustment原理(1)
那些光束平差的工具,比如SBA、SSBA之类的虽然好,然而例子和教程都不够多且不够详细,让初学者难以上手。
要传入的参数虽然有解释,然而却也不是十分清楚其含义,具体要怎么生成,生成为什么形式。
我在折腾了一段时间后也还是没成功,逼得我自己找这方面的资料学习,想要更了解bundle adjustment的原理。
想着干脆自己写一个简单的bundle框架练练手,就算写不成也将有助于让这些工具正常工作起来。
三维重建的最后一步是光束平差,又称bundle adjustment,本文介绍一下bundle adjustment的数学原理。
主要是参考 https://www.coursera.org/learn/robotics-perception/home/welcome 第4周里头的内容。
本文做一些数学上的推导以及将资料中的各种公式的含义细化。
自己在推导过程中发现了上述课程ppt中的一些细节地方的公式有错。
2016-09-07 10:24:33
除了上面的资料外,还参考了另一篇文献 “SBA: A Software Package for Generic Sparse Bundle Adjustment”,在bundle adjustment的wiki下以及MATLAB R2016a自带的bundleAdjustment函数中都参考了这篇文献。这篇文献和上述课程ppt中的变量设置略有不同,但大体框架是一样的。
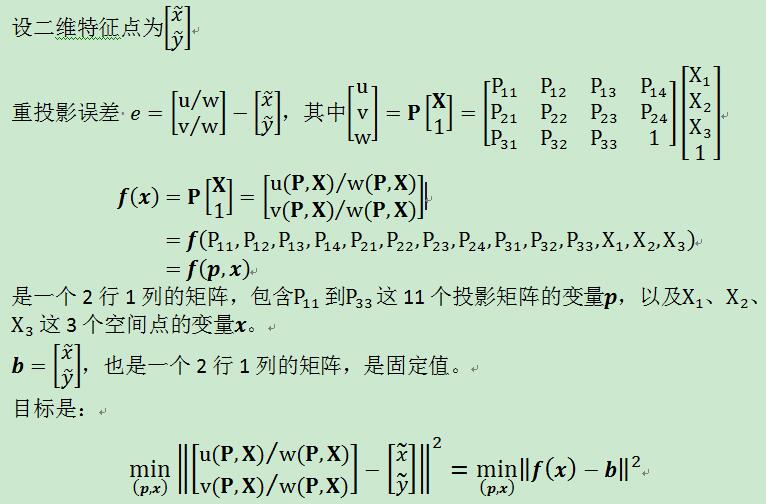
整个 bundle adjustment 的目标是重投影误差最小,所以可以分为两个部分:
1,将某个误差函数的值最小化。这是一个最优化问题,用的是L-M算法。我已经写了一篇L-M算法的博客。
2,将重投影误差的误差函数的具体表达式写出来,套到上面的L-M算法里头去。
假设读者已经有一些最优化的知识。
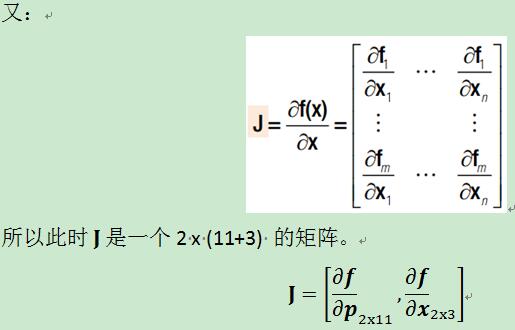
先从只有1个点、1个相机讲起:
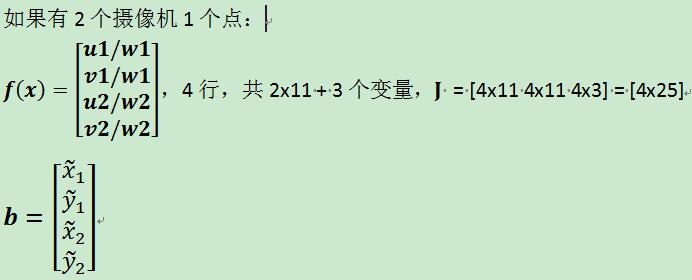
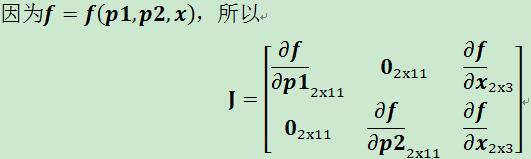
2个摄像机1个点的情况:
2个摄像机2个点的情况:
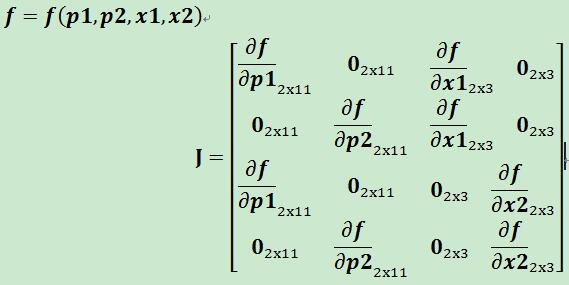
假如有3个摄像机,4个点,则J的大致情形如下,里头的含义模仿上面很容易搞清楚:
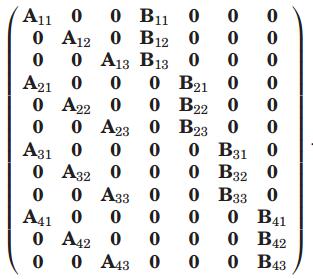
对于列来讲,前面3列对应着3个摄像机的变量,后面4列对应着4个点的变量。
那么函数f对变量p和x的偏导怎么求?只有用MATLAB的符号推导才能搞出来,手算非常容易出错
MATLAB代码如下:
被调用的函数sym_mat:
|
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
|
function rtn = sym_mat(x,m,n)% 生成符号矩阵,第一个参数是一个符号,后面两个参数是符号矩阵的尺寸% 如果你想生成符号矩阵[x11 x12; x21 x22]只需输入sym_mat(x,2,2)% 但事先要先声明符号x,用syms x% 如果你只需要生成一维矩阵,sym_mat会生成一个列向量,如sym_mat(x,2);% 例子:% syms x;% A = sym_mat(x,3,4) 返回一个3 x 4的符号矩阵if nargin == 2 for i=1:m rtn(i)=sym([inputname(1),num2str(i)]); end rtn = rtn.\';elseif nargin == 3 for i = 1:m for j = 1:n rtn(i,j) = sym([inputname(1),num2str(i),num2str(j)]); end endend |
符号推导部分:
|
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
|
clear all;clc;close all;syms P;P = sym_mat(P,3,4);P(3,4) = 1P_var = symvar(P)syms X;X = [sym_mat(X,3); 1]X_var = symvar(X)uvw = P*X;u = uvw(1,:);v = uvw(2,:);w = uvw(3,:);f = ... [u/w; v/w];f_P = jacobian(f,P_var)f_X = jacobian(f,X_var)J = [f_P f_X]sym_in_J = symvar(J) |
f_P 代表函数 f 对 P 求导,得到 2 x 11 的矩阵
f_X 代表函数 f 对 X 求导,得到 2 x 3 的矩阵
结果很复杂,就不贴出来了。
具体计算矩阵J的值的时候,把变量替换成相应的值就可以了,MATLAB中有subs函数,如果用c++写,
则要自己写一个函数,把值传进去算矩阵J的值。
对于多点多相机的矩阵J,计算不同部分的 f_P 和 f_X,然后把它们组装成一个大的矩阵即可。
先写到这里。。。
以上是关于bundle adjustment原理转载的主要内容,如果未能解决你的问题,请参考以下文章
Pose-Graph Optimization vs Bundle Adjustment
双视图下Bundle Adjustment重投影误差的雅可比矩阵
史上最简SLAM零基础解读 - Jacobian matrix(雅可比矩阵) → 理论分析与应用详解(Bundle Adjustment)
java.util.MissingResourceException: Can't find bundle for base name init, locale zh_CN问题的处理(代码片段