RPY roll pitch yaw
Posted
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了RPY roll pitch yaw相关的知识,希望对你有一定的参考价值。
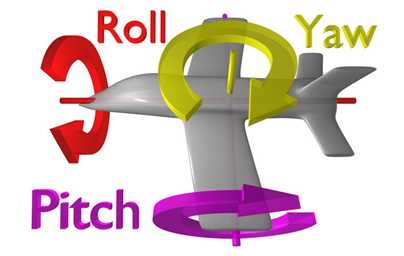
参考技术A roll代表绕z轴旋转,pitch代表绕x轴旋转,yaw代表绕y轴旋转,下面是我们俗称的在飞机坐标系下的RPY欧拉角有两种:
静态 :即绕世界坐标系三个轴的旋转,由于物体旋转过程中坐标轴保持静止,所以称为静态。
动态 :即绕物体坐标系三个轴的旋转,由于物体旋转过程中坐标轴随着物体做相同的转动,所以称为动态。
使用动态欧拉角会出现万向锁现象(很显然,如下图二所在坐标系,如果从飞机头往下看,无论怎么都不能看到飞机体了,丢掉了一个维度);静态欧拉角不存在万向锁的问题。
一个典型的万向锁问题可以表述如下:先heading45°再pitch90°,这与先pitch90°再bank45°是等价的。事实上,一旦选择±90°作为pitch角,就会导致第一次旋转和第三次旋转等价,整个旋转表示系统被限制在只能绕竖直轴旋转,丢失了一个表示维度。这种角度为±90°的第二次旋转使得第一次和第三次旋转的旋转轴相同的现象,称作万向锁。
值得注意的是,在ROS的定义中,RPY就是分别绕x,y和z进行旋转
pitch, yaw, roll
在航空中,pitch, yaw, roll下图所示。
pitch是围绕X轴旋转,也叫做俯仰角。
yaw是围绕Y轴旋转,也叫偏航角。
roll是围绕Z轴旋转,也叫翻滚角。
以上是关于RPY roll pitch yaw的主要内容,如果未能解决你的问题,请参考以下文章
iPhone 抓拍动作的 Roll、Pitch 和 Yaw 的最大值和最小值
英文下肢结构Hip Yaw Pitch, Hip Pitch, Hip Roll, Knee Pitch, Ankle Pitch, Ankle Roll的翻译