ROS下创建第一个节点工程
Posted 海角逛天涯
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了ROS下创建第一个节点工程相关的知识,希望对你有一定的参考价值。
1、创建工作区
mkdir catkin_ws
cd catkin_ws
mkdir src
2、在src目录下创建包Myrobot,后面所跟roscpp rospy为依赖包
catkin_create_pkg Myrobot roscpp rospy
3、在Myrobot目录下创建src文件夹
mkdir src
4、进入上一步创建的src目录,创建程序文件hello.cpp,(此处文件名为hello)
vim hello.cpp
5、创建完成后编写hello world程序
#include <iostream>
int main()
{
std::cout<<"Hello World!"<<std::endl;
return 0;
}
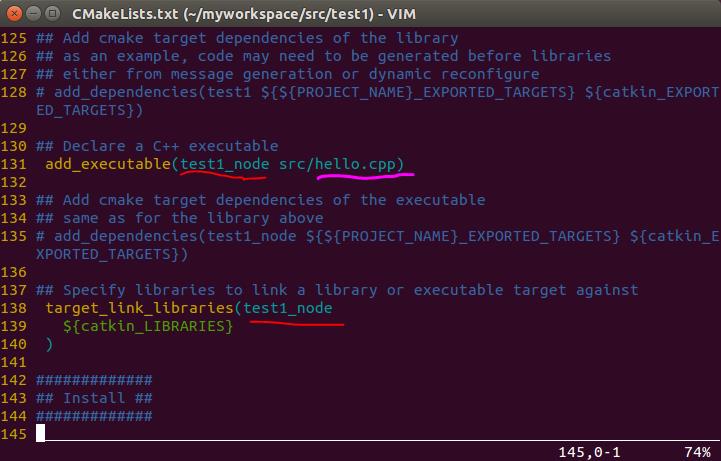
6、修改配置文件,打开Myrobot包下面的CMkeLists.txt文件,如图所示去掉131、138、139、140行前的注释,粉色标注部分的文件名必须与src目录中得文件名相同,两处红色标注部分为节点名,必须前后一致。
7、编写完成后保存退出,命令为(:wq),回到catkin_ws目录输入以下命令进行编译
catkin_make
8、进入catkin_ws目录,输入以下命令
source ./devel/setup.bash
9、新建一个终端(ctrl+alt+t),输入以下命令
roscore //运行主节点
10、新建终端,执行以下命令
source catkin_ws/devel/setup.bash
rosrun Myrobot test1_node //Myrobot为包名,test1_node为节点名

以上是关于ROS下创建第一个节点工程的主要内容,如果未能解决你的问题,请参考以下文章