理解ROS话题---ROS学习第4篇
Posted loongembedded
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了理解ROS话题---ROS学习第4篇相关的知识,希望对你有一定的参考价值。
1. 通过键盘控制turtle
(1) 打开一个终端运行roscore
(2) 再打开一个新的终端来打开turtlesim_node节点
kandi@ubuntu:~$ rosrun turtlesim turtlesim_node
弹出一个乌龟的界面
(3) 再打开一个新的终端,通过键盘控制turtle
kandi@ubuntu:~$ rosrun turtlesim turtle_teleop_key

现在就可以通过键盘上的方向键来控制turtle运动了,要确保turtle_teleop_key的终端窗口是在任务最前面,这样才能获取方向键的输入,才能看到turtle的移动
2. ROS话题
turtlesim_node节点和turtle_teleop_key节点之间是通过一个ROS话题来相互通信的。turtle_teleop_key在话题上发布键盘按下的消息,turtlesim则订阅该话题以接收消息。我们使用rqt_graph来显示当前运行的节点和话题。
2.1 使用rqt_graph
打开一个新的终端:
$ rosrun rqt_graph rqt_graph
弹出一个窗口
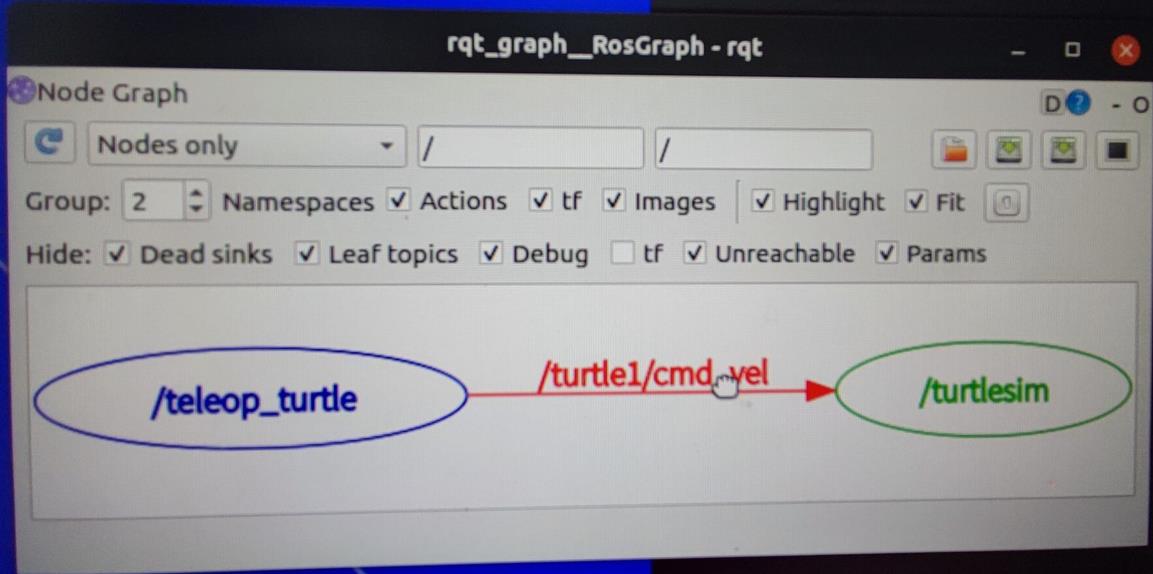
把鼠标放在/turtle/cmd_vel上方,相应的ROS节点(蓝色和绿色)和话题(红色)就会高亮显示。其中turtle_teleop_key节点对应蓝色的/teleop_turtle,turtlesim_node节点对应绿色的/turtlesim,可以看到,这两个节点通过一个名为/turtle1/cmd_vel的话题来相互通信。
以上是关于理解ROS话题---ROS学习第4篇的主要内容,如果未能解决你的问题,请参考以下文章