编写简单的服务和客户端(C++)---ROS学习第10篇
Posted loongembedded
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了编写简单的服务和客户端(C++)---ROS学习第10篇相关的知识,希望对你有一定的参考价值。
文章目录
1. 编写服务节点
这里,我们将创建简单的服务(Service)节点add_two_ints_server,该节点将接收两个整数,并返回它们的和。将当前目录切换到之前的教程中创建的study包中,另外请确保你已经按照[之前介绍]中的指示创建了本教程(https://loongembedded.blog.csdn.net/article/details/122423436)中需要的服务AddTwoInts.srv。
#include "ros/ros.h"
#include "study/AddTwoInts.h"
bool add(study::AddTwoInts::Request &req,
study::AddTwoInts::Response &res)
res.sum = req.a + req.b;
ROS_INFO("request: x=%ld, y=%ld", (long int)req.a, (long int)req.b);
ROS_INFO("sending back response: [%ld]", (long int)res.sum);
return true;
int main(int argc, char **argv)
ros::init(argc, argv, "add_two_ints_server");
ros::NodeHandle n;
ros::ServiceServer service = n.advertiseService("add_two_ints", add);
ROS_INFO("Ready to add two ints.");
ros::spin();
return 0;
advertiseService(const string &service, bool(*srv_func)(Mreq &, Mres &));
创建 server,作为 service 通讯中的服务端
第一个参数是该 server 提供的 service 名称
第二个参数是服务函数的指针,指向服务函数。服务函数接受两个参数,分别为请求和响应。
2. 编写客户端节点
在study包中创建src/add_two_ints_client.cpp文件并粘贴以下内容进去:
#include "ros/ros.h"
#include "study/AddTwoInts.h"
#include <cstdlib>
int main(int argc, char **argv)
ros::init(argc, argv, "add_two_ints_client");
if (argc != 3)
ROS_INFO("usage: add_two_ints_client X Y");
return 1;
ros::NodeHandle n;
ros::ServiceClient client = n.serviceClient<study::AddTwoInts>("add_two_ints");
study::AddTwoInts srv;
srv.request.a = atoll(argv[1]);
srv.request.b = atoll(argv[2]);
if (client.call(srv))
ROS_INFO("Sum: %ld", (long int)srv.response.sum);
else
ROS_ERROR("Failed to call service add_two_ints");
return 1;
return 0;
ros::ServiceClient client = n.serviceClientstudy::AddTwoInts(“add_two_ints”);
这为add_two_ints服务创建一个客户端,ros::ServiceClient对象的作用是在稍后调用服务。
study::AddTwoInts srv;
srv.request.a = atoll(argv[1]);
srv.request.b = atoll(argv[2]);
这里实例化一个自动生成的服务类,并为它的request成员赋值。一个服务类包括2个成员变量:request和response,以及2个类定义:Request和Response。
if (client.call(srv))
此处实际上调用了服务。由于服务调用被阻塞,它将在调用完成后返回。如果服务调用成功,call()将返回true,并且srv.response中的值将是有效的。如果调用不成功,则call()将返回false且srv.response的值将不可用。
3. 构建节点
编辑一下study里面的CMakeLists.txt文件,文件位于~/catkin_ws/src/study/CMakeLists.txt,并将下面的代码添加在文件末尾:
add_executable(add_two_ints_server src/add_two_ints_server.cpp)
target_link_libraries(add_two_ints_server $catkin_LIBRARIES)
add_dependencies(add_two_ints_server study_gencpp)
add_executable(add_two_ints_client src/add_two_ints_client.cpp)
target_link_libraries(add_two_ints_client $catkin_LIBRARIES)
add_dependencies(add_two_ints_client study_gencpp)
这将创建两个可执行文件add_two_ints_server和add_two_ints_client,默认情况下,它们将被放到软件包目录下的devel空间中,即~/catkin_ws/devel/lib/。
进入工作空间编译生成可执行文件
cd ~/catkin_ws
catkin_make
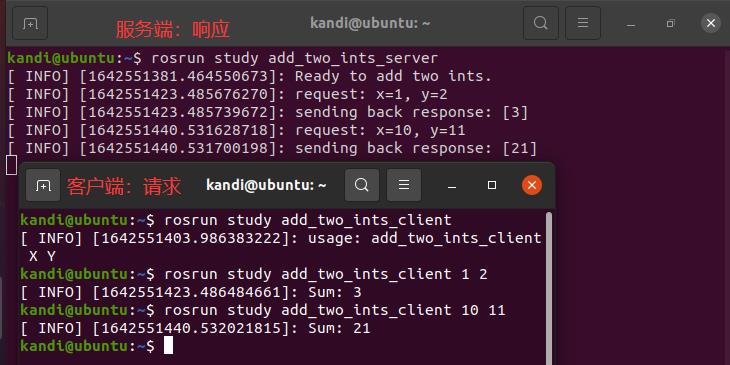
4. 运行可执行文件
以上是关于编写简单的服务和客户端(C++)---ROS学习第10篇的主要内容,如果未能解决你的问题,请参考以下文章