ROS学习笔记——软件版本的选择
Posted Genrobot
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了ROS学习笔记——软件版本的选择相关的知识,希望对你有一定的参考价值。
下面是Google的SLAM系统Cartographer对系统的要求:
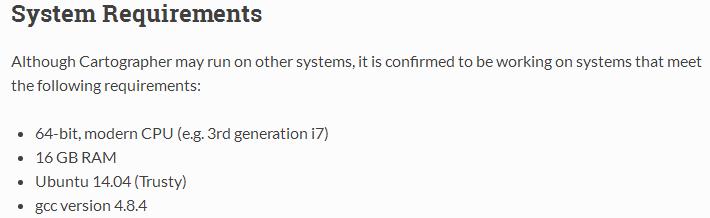
Cartographer对ROS版本要求:

ROS Indigo 对Ubantu 的版本要求:

所以,综上所述:
Ubantu 版本:Trusty (14.04)
ROS 版本:ROS Indigo Igloo
PS:ROS 网站:http://wiki.ros.org/
Cartographyer网站:https://github.com/googlecartographer
以上是关于ROS学习笔记——软件版本的选择的主要内容,如果未能解决你的问题,请参考以下文章
ROS1学习笔记:ROS命令行工具的使用(ubuntu20.04)