《机电传动控制》——直流电机调速仿真作业
Posted
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了《机电传动控制》——直流电机调速仿真作业相关的知识,希望对你有一定的参考价值。
《机电传动控制》——直流电机调速仿真作业
胡恒谦 机卓1301 U201310563
一、对PID各调节环节的介绍
在PID调节中,各部分的作用如下:
比例调节作用:比例控制是一种最简单的控制方式。其控制器的输出与输入误差信号成比例关系。是按比例反应系统的偏差,系统一旦出现了偏差,比例调节立即产生调节作用用以减少偏差。比例作用大,可以加快调节,减少误差,但是过大的比例,使系统的稳定性下降,甚至造成系统的不稳定。当仅有比例控制时系统输出存在稳态误差(Steady-state error)。
积分调节作用:在积分控制中,控制器的输出与输入误差信号的积分成正比关系。对一个自动控制系统,如果在进入稳态后存在稳态误差,则称这个控制系统是有稳态误差的或简称有差系统(System with Steady-state Error)。为了消除稳态误差,在控制器中必须引入“积分项”。积分项对误差取决于时间的积分,随着时间的增加,积分项会增大。这样,即便误差很小,积分项也会随着时间的增加而加大,它推动控制器的输出增大使稳态误差进一步减小,直到等于零。因此,比例+积分(PI)控制器,可以使系统在进入稳态后无稳态误差。积分作用的强弱取决与积分时间常数Ti,Ti越小,积分作用就越强。反之Ti大则积分作用弱,加入积分调节可使系统稳定性下降,动态响应变慢。积分作用常与另两种调节规律结合,组成PI调节器或PID调节器。
微分调节作用:微分作用反映系统偏差信号的变化率,具有预见性,能预见偏差变化的趋势,因此能产生超前的控制作用,在偏差还没有形成之前,已被微分调节作用消除。因此,可以改善系统的动态性能。在微分时间选择合适情况下,可以减少超调,减少调节时间。微分作用对噪声干扰有放大作用,因此过强的加微分调节,对系统抗干扰不利。此外,微分反应的是变化率,而当输入没有变化时,微分作用输出为零。微分作用不能单独使用,需要与另外两种调节规律相结合,组成PD或PID控制器。
二、直流电机调速仿真
确定P、I、D中的各项参数时,常见的参数调整法有临界比例度法、衰减曲线法和经验法。仿真过程中采用临界比例度法确定了大概的Kp值。仿真过程中原本计划使用PID调节,在若干次调整的过程中,发现PI调节的效果已经比较理想,加入微分环节后调整时间略有上升,故依然采用PI调节。调整参数确定为Kp=90,Ki=30。控制器部分的程序如下图所示。
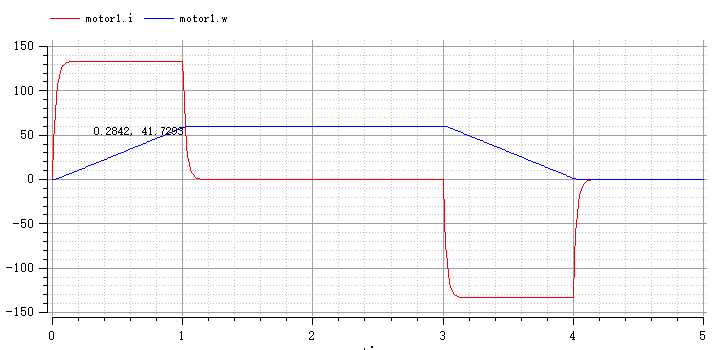
电机电流和速度曲线如下图所示。
进一步细致观察0~0.2S的曲线,如下图。
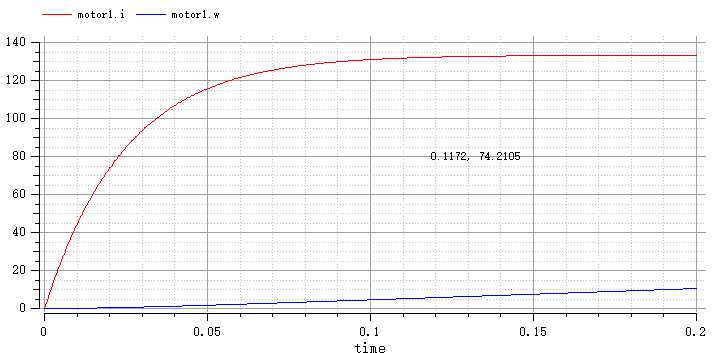
可见,该PI控制模型无超调,电流在0.05秒达到稳定值的90%,0.14秒就达到稳定值,调整时间较短。
以上是关于《机电传动控制》——直流电机调速仿真作业的主要内容,如果未能解决你的问题,请参考以下文章