第6章 约束满足问题CSP
Posted gru-blog
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了第6章 约束满足问题CSP相关的知识,希望对你有一定的参考价值。
第六章 约束满足问题CSP
一、问题定义
问题定义
状态空间,状态被定义为在值域Di中的变量Xi;
当前状态;
转移模型;
目标测试,每个变量都有自己的赋值同时满足约束条件;
评估函数。
三个成分
X是变量集合
[
{X_1,...,X_n}
]
D是值域集合
[
{D_1,...,D_n}
]
,每个变量都有自己的值域。
C是描述变量取值的约束集合
特点
CSP的解是相容的、完整的赋值。
相容:不违反任何约束条件的赋值称为相容的或合法的赋值。
完整赋值:每个变量都已赋值。
约束图
结点为变量,边表示两者间有约束关系。
形式化
离散变量
有限值域:n个变量,值域集合大小为d,e.g. 布尔变量
无限值域:整数,字符串等
连续变量
e.g.如哈勃望远镜的实验日程安排,每次观察的开始,结束时间
线性约束,二次规划求解
一元约束:只涉及一个变量,SA!=green
二元约束:涉及两个变量,SA!=WA
高阶约束:涉及3个或者3个以上变量
全局约束:变量个数任意的约束称为全局约束
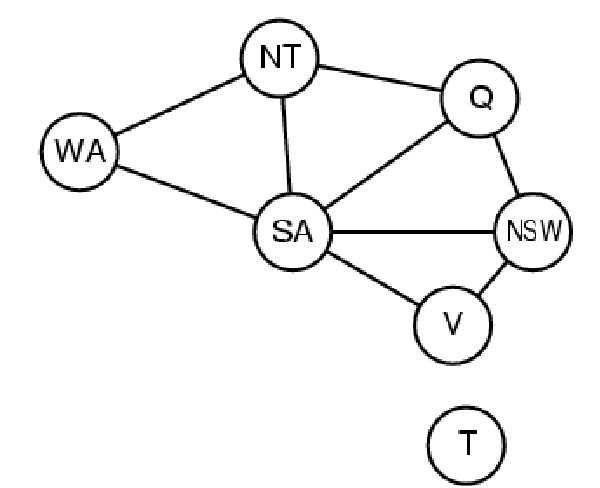
举例

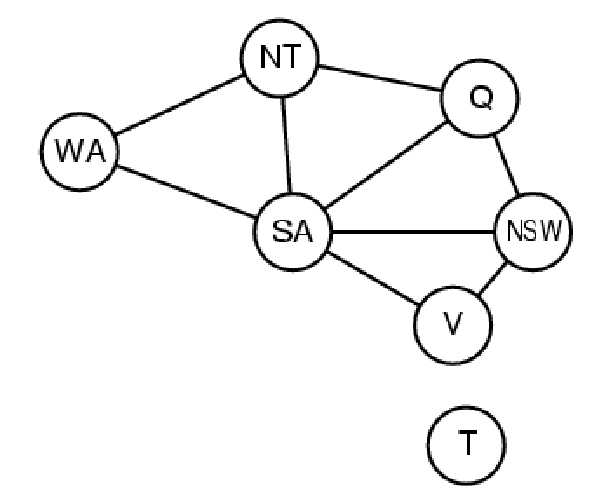
变量:WA, NT, Q, NSW, V, SA, T
值域:{red,green,blue}
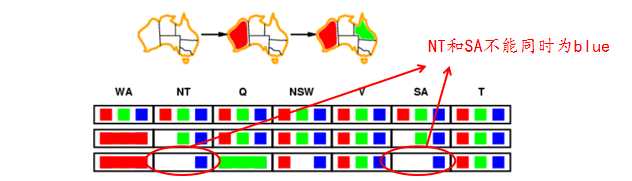
约束条件:相邻的区域必须是不同的颜色
解之一:WA = red, NT = green,Q = red, NSW =green, V = red, SA = blue, T = green
二、推理——约束传播
思想
使用约束来减小一个变量的合法取值范围,从而影响到跟此变量有约束关系的另一变量的取值,如此进行。
相容
结点相容
单个变量值域中的所有取值满足一元约束
Eg., SA!=green 转化为SA的值域为{red,blue}
弧相容
某变量值域中的所有取值满足该变量的所有二元约束
e.g. Y=X^2, X,Y都是数字
弧相容<(X,Y),{(0,0),(1,1),(2,4),(3,9)}>
通用弧相容
Xi相对于某n元约束是相容的
e.g. 所有变量值域{0,1,2,3},约束X<Y<Z,则如果X值域缩小为{0,1}称X是通用弧相容的。
弧相容算法
首先,工作集中包含CSP中所有的弧。AC-3从工作集中弹出弧(Xi,Xj),首先使Xi相对于Xj弧相容。如果Di没有变化则继续处理下一条弧,否则每个指向Xi的弧(Xk,Xi)都必须重新插入工作集中准备检验。之所以这么做是因为Di的改变可能引起Dk的改变。如果Di成为空集,则无相容解。否则继续检查,直到工作集中没有弧。
function ac_3 (X, D, C){
while (!worklist_empty()){
(Xi,Xj)=remove_first(worklist)
if revise(csp,Xi,Xj){
if (sizeof(Di)==o){
return false;
}
for each Xk in Xi.NEIGHBORD-{Xj} do{
add(Xk,Xi)to worklist;
}
}
}
return true;
}
function revise(csp,xi,xj){
revised=false;
for each x in Di{
if(no value y in Dj allows(x,y) to satisfy the constraint between Xi and Xj){
delete x from Di;
revised=true;
}
}
return revised;
} 时间复杂度
[
O(cd^3)
]
c个二元约束,变量值域最大为d个元素
路径相容
两个变量集合{Xi,Xj}对于第三个变量Xm是相容的,指{Xi,Xj}的每一个相容赋值{Xi=a,Xj=b}, Xm都有合适的取值同时使得{Xi,Xm},{Xm,Xj}是相容的。
e.g. 检查{WA,SA}对于NT在值域{red,blue}的条件下是否是相容的。
k相容
K相容:如果对于任何k-1个变量的赋值,第K个变量总能被赋予一个和前面k-1个变量相容的值。
如果一个图是k相容的,k-1相容的,…,直到1相容的,那么此CSP是强k相容的。
三、回溯搜索
通用搜索模式
状态是由赋值的变量决定的
通用的搜索模式
初始状态:设为空{}
步骤:给一个没有赋值的变量赋值,该赋值不与当前已赋值的变量相冲突
目标测试:如果所有赋值完成且满足终止状态,则搜索结束,否则搜索失败
CSP适用于通用的搜索模式,并采用深度搜索方法
回溯搜索
思想
对于CSP采用深度优先的单个变量赋值,当检测到不相容时,返回上一次赋值。
特点
变量的赋值顺序是可以交换的,在每一个结点只需要考虑一个变量的赋值,在算法之前需要固定变量的赋值顺序,叶子结点数减少到d^n。
提高算法效率的策略
选择变量赋值的顺序
选择值域中赋值的顺序
更早地检测不可避免的失败
最受约束变量
优先选择最少剩余值的变量进行赋值
约束最多变量
优先选择最能约束其他变量的变量进行赋值
最少约束值方法
选择使得剩余变量赋值空间更大的值
前向检验
思想
追踪未赋值变量的剩余合法赋值;当任何一个剩余变量没有合法赋值时搜索终止。
特点
前向检测从赋值变量向未赋值变量传播信息,但不能对失败提供早期检测。
改进MAC(维护弧相容)
当xi赋值后,从与xi邻接的弧中所有未赋值变量xj开始进行约束传播,一旦某变量的值域为空则回溯
例
智能回溯
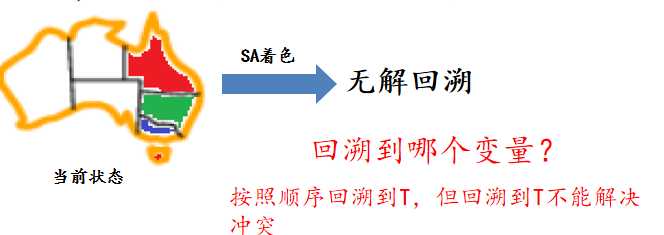
Solution:建立冲突集,回溯到冲突集中时间最近的赋值,SA的冲突集为{Q,NSW,V},所以回溯到V
四、问题结构
独立的子问题
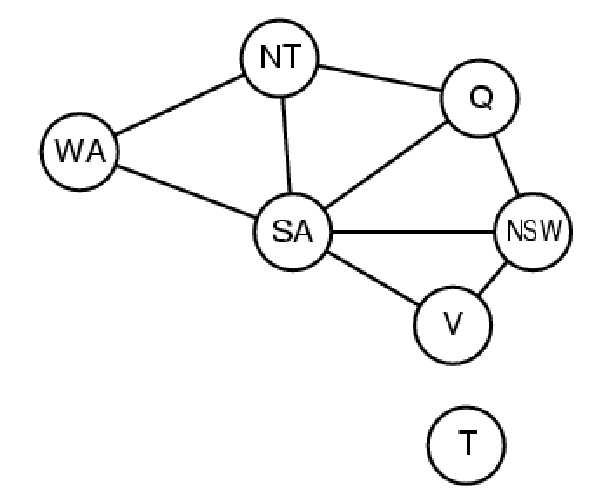
不相连的结构
e.g. Tasmania 与其他地区不相连
独立性子问题通过寻找连通子图来确定
拓扑排序
适用
求解树结构的CSP
思想
任意选择一个变量为树的根,选择变量顺序使每个变量在树中出现在父结点之后。
特点
n个结点n-1条弧,O(n)步将此图改造成直接弧相容,每一步比较两个变量的d个可能取值,所以总时间为O(nd^2)。
约束图到树
基于删除结点的方法
从CSP的变量中选择子集S(SA),使得约束图在删除S后成为一棵树,S称为环割集
对于满足S所有约束的每个可能赋值
- 求CSP剩余变量的值域,然后从中中删除与S的赋值不相容的值
- 如果去掉S后的剩余CSP有解,把解和S的赋值一起返回
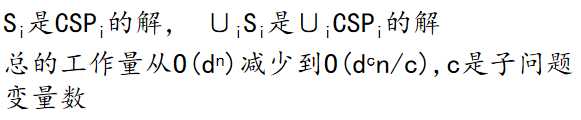
基于合并结点的方法
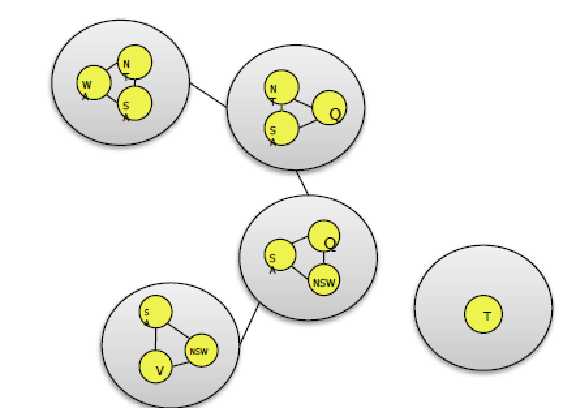
把约束图分解成相关联的子问题
对每个子问题单独求解,再把结果合并起来
树分解的三个条件
每个变量至少出现在一个子问题中
每个约束至少出现在一个子问题中
如果一个变量出现在两个子问题中,那么它必须出现在连接在这两个子问题的路径上的所有子问题中(?)
以上是关于第6章 约束满足问题CSP的主要内容,如果未能解决你的问题,请参考以下文章