ABB机器人判断输入信号有延时,求大神指教~
Posted
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了ABB机器人判断输入信号有延时,求大神指教~相关的知识,希望对你有一定的参考价值。
问题点:执行图片程序,在“357”动作结束后,会有约1秒的延时才会执行“360”。正常动作应该没有这1秒的延时。说明:Clamp02的HomePos/Reached是汽缸上的松开/夹紧的磁性开关发现1:所以程序只要是前一个动作是WaitDI Clamp02的HomePos/Reached 均会有约1秒的延时(WaitTime我都改成了0秒)发现2:观察IO卡及示教器的输入上的Clamp02的HomePos/Reached输入信号,没有发现有延时的现象。也就是说,控制Clamp02的Close/Open,信号会马上切换过来,没有延时。发现2:如将上图的:“357 -----WaitDI X34_Clamp02_HomePos,1;”注释掉,就不会有这1秒的延时。以上是我的问题,麻烦还请看看怎么弄,谢谢~
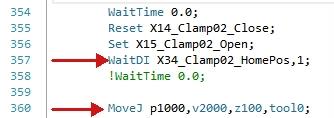
问题点:执行图片程序,在“357”动作结束后,会有约1秒的延时才会执行“360”。正常动作应该没有这1秒的延时。
说明:Clamp02的HomePos/Reached是汽缸上的松开/夹紧的磁性开关
发现1:所以程序只要是前一个动作是WaitDI Clamp02的HomePos/Reached 均会有约1秒的延时(WaitTime我都改成了0秒)
发现2:观察IO卡及示教器的输入上的Clamp02的HomePos/Reached输入信号,没有发现有延时的现象。也就是说,控制Clamp02的Close/Open,信号会马上切换过来,没有延时。
发现3:如将上图的:“357 -----WaitDI X34_Clamp02_HomePos,1;”注释掉,就不会有这1秒的延时。以上是我的问题,麻烦还请看看怎么弄,谢谢~
监控了IO卡及示教器的IO显示,只要汽缸动作,相应的信号等会马上亮起(人感觉不出延时),但实际动作时就会有延时1秒。
参考技术A zonedata没有设置为fine,程序指针会提前预读 参考技术B 请问你是怎么解决的我用JQuery miniui 做了一个表格,求大神指教一个下拉框问题
上方三个必选条件(input),input的下拉框内容是从数据库里拿出来的,要求是在输入框里输入达到模糊查询(我已完成),但是如果输入了下拉框里没有的数字或字母,下拉框还是会显示一个空白的下拉框
请问大神是否有什么办法当输入不存在的东西模糊查询后,别让input出现那个空白的下拉框,请详述,万分感谢

<input id="myCar" list="cars" />
<datalist id="cars">
<option value="BMW">
<option value="Ford">
<option value="Volvo">
</datalist>追问
如果有另一种情况:如果输入的是已存在于数据库的内容,则允许执行下一步,但input框有一种缺陷,输入不存在于数据库的内容后,会出现一个没有内容的空白下拉框,一旦用户点了这个空白下拉框,input框内的内容就不会被检查,请问大神,有没有什么办法可以让输入的内容不是数据库里的内容时别出现空白的下拉框么?只要别出现就好
追答既然是下拉框,那肯定是先从数据库中读取数据,你遍历获取到的数据到option输出,然后模糊查找的时候就不用再次查找数据库了呀,datalist带有模糊查询功能,直接在输入框中输入内容,不存在什么都不会显示的


这是上面给你例子的截图,并没有空白下拉框


以上是关于ABB机器人判断输入信号有延时,求大神指教~的主要内容,如果未能解决你的问题,请参考以下文章