机器人微控制器编程(CoCube)-突破边界
Posted zhangrelay
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了机器人微控制器编程(CoCube)-突破边界相关的知识,希望对你有一定的参考价值。
将C语言+嵌入式+单片机+ROS2等相关知识点,有机融合到一门课程之中。
突破windows或linux的限制,突破电脑或手机的限制,突破单片机原有的理论实践体系,全面提升到CoCube机器人平台。

模拟量采集和转换:

#include "Arduino.h"
#include <ESP32AnalogRead.h>
ESP32AnalogRead adc;
void setup()
adc.attach(34);
Serial.begin(115200);
void loop()
delay(50);
Serial.println("Voltage = "+String(adc.readVoltage()));
机器人电池电压的实时监控:

#include <micro_ros_arduino.h>
#include <stdio.h>
#include <rcl/rcl.h>
#include <rcl/error_handling.h>
#include <rclc/rclc.h>
#include <rclc/executor.h>
#include <std_msgs/msg/float32.h>
#if !defined(ESP32) && !defined(TARGET_PORTENTA_H7_M7) && !defined(ARDUINO_NANO_RP2040_CONNECT)
#error This example is only avaible for Arduino Portenta, Arduino Nano RP2040 Connect and ESP32 Dev module
#endif
#define BAT_DET 34
rcl_publisher_t publisher;
std_msgs__msg__Float32 msg;
rclc_support_t support;
rcl_allocator_t allocator;
rcl_node_t node;
#define LED_PIN 13
#define RCCHECK(fn) rcl_ret_t temp_rc = fn; if((temp_rc != RCL_RET_OK))error_loop();
#define RCSOFTCHECK(fn) rcl_ret_t temp_rc = fn; if((temp_rc != RCL_RET_OK))
void error_loop()
while(1)
digitalWrite(LED_PIN, !digitalRead(LED_PIN));
delay(100);
void timer_callback(rcl_timer_t * timer, int64_t last_call_time)
RCLC_UNUSED(last_call_time);
if (timer != NULL)
RCSOFTCHECK(rcl_publish(&publisher, &msg, NULL));
msg.data++;
void setup()
set_microros_wifi_transports("***", "***", "***", 8888);
pinMode(BAT_DET, INPUT);
pinMode(LED_PIN, OUTPUT);
digitalWrite(LED_PIN, HIGH);
delay(2000);
allocator = rcl_get_default_allocator();
//create init_options
RCCHECK(rclc_support_init(&support, 0, NULL, &allocator));
// create node
RCCHECK(rclc_node_init_default(&node, "robot_battery_wifi_node", "", &support));
// create publisher
RCCHECK(rclc_publisher_init_best_effort(
&publisher,
&node,
ROSIDL_GET_MSG_TYPE_SUPPORT(std_msgs, msg, Float32),
"robot_battery"));
msg.data = 0.66;
void loop()
float battery = 4.21 * analogRead(BAT_DET) / 2435;
RCSOFTCHECK(rcl_publish(&publisher, &msg, NULL));
msg.data=battery;
delay(1000);
不仅掌握的模拟量基本读取,也能知道其应用,例如电池电量测量,环境亮度监测等一系列涉及到具体机器人各环节的基础知识点。
从原有枯燥的单片机知识点融合到机器人细节设计的实际调试。
C和C++的区别,电脑C++编程和嵌入式C编程,代码如何保持相似的风格。
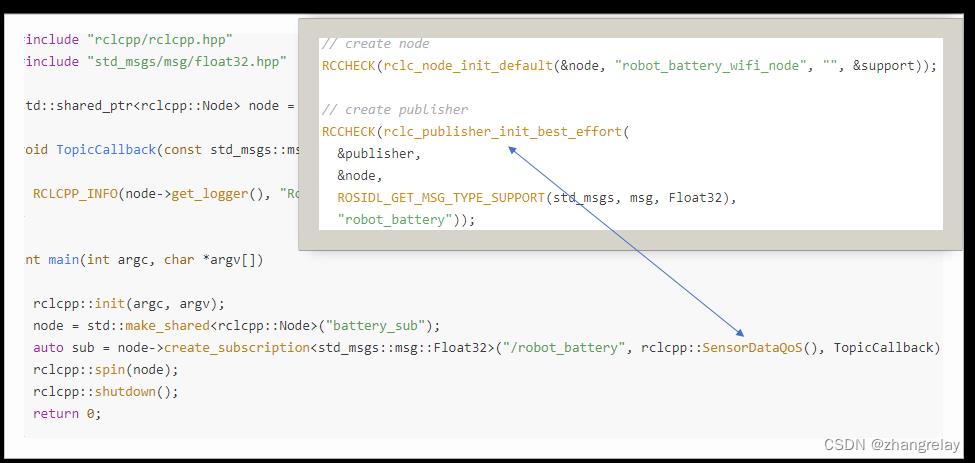
ESP32:
RCCHECK(rclc_publisher_init_best_effort(
&publisher,
&node,
ROSIDL_GET_MSG_TYPE_SUPPORT(std_msgs, msg, Int32),
"topic_name"));
RCCHECK(rclc_publisher_init_default(
&publisher,
&node,
ROSIDL_GET_MSG_TYPE_SUPPORT(std_msgs, msg, Int32),
"topic_name"));
PC:
rclcpp::QoS qos(rclcpp::KeepLast(7));
pub_ = this->create_publisher<std_msgs::msg::String>("chatter", qos);
sub_ = create_subscription<std_msgs::msg::String>("chatter", rclcpp::SensorDataQoS(), callback);
sub_ = create_subscription<std_msgs::msg::String>("chatter", 10, callback);
以上是关于机器人微控制器编程(CoCube)-突破边界的主要内容,如果未能解决你的问题,请参考以下文章