机器人微控制器编程(CoCube)-深度融合
Posted zhangrelay
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了机器人微控制器编程(CoCube)-深度融合相关的知识,希望对你有一定的参考价值。
网络技术是实现多机器人的基础。
机器人之间能相互通信,机器人和主控台也能相互通信。
通信连接:
- 有线
- 无线
无线时延的问题?
如何提升CoCube通信效率呢。
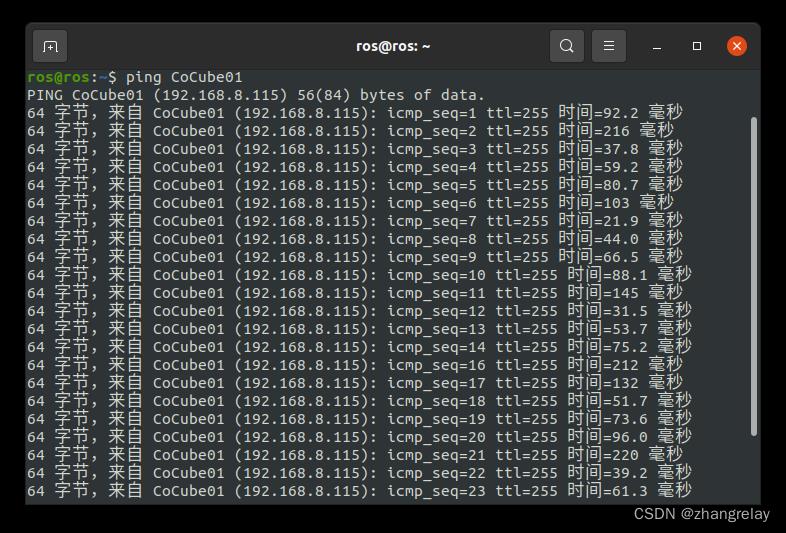
从上图可以看到,时延50ms
如何提升到下图:

从而可以实现控制信号传输:

对偶系统。角度变换。
机器人也可以变为遥控器,各种数据都可以实时显示并绘制图表。


传感器实际测量值和真实数值之间,有何关系。
小知识:
1-30ms:极快,几乎察觉不出延迟,玩任何游戏都特别顺畅。
31-50ms:良好,可以正常游戏,没有明显的延迟情况。
51-100ms:普通,对抗类游戏能够感觉出延迟明显,有卡顿情况。
>100ms:差,无法正常游戏,会有丢包并掉线现象。
可以查看是否延迟
第一招:修改无线路由器的信道
1,首先我们进入无线路由器的设置页面,在无线网络设置中找到信道设置。
信道设置
2,开启WDS并扫描周围无线网络情况。
开启WDS
3.根据周围无线网络信道选择比较少人知道的信道。
选择比较少人知道的信道
4.重启路由器,看一下网络延迟是否降低了?
第二招:更改无线频段
此种方法与更改信道的原因相同,因为现在我们使用的路由器大部分都在使用2.4GHz的频段,5GHz频段使用的比较少,我们可以可以把路由器更改并使用5GHz的频段。
更改频段为5GHz
第三招:升级无线路由器固件
有的时候,由于固件原因,无线路由器会因为估计错误导致WIFI的不稳定情况,所以建议大家每隔一段时间登陆路由器检查更新固件。
家里的WIFI出现延迟,也有可能是连接的人数过多,可以查看下,自己家里的WIFI是否被其它人盗用,最好可以绑定MAC进行连接,或者更换一个比较复杂的密码。
MPU 6050
智能型手机 平板装置设备 手持型游戏产品 游戏机 3D遥控器 可携式导航设备
以数字输出6轴或9轴的旋转矩阵、四元数(quaternion)、欧拉角格式(Euler Angle forma)的融合演算数据。 具有131 LSBs/°/sec 敏感度与全格感测范围为±250、±500、±1000与±2000°/sec 的3轴角速度感测器(陀螺仪)。 可程式控制,且程式控制范围为±2g、±4g、±8g和±16g的3轴加速器。 移除加速器与陀螺仪轴间敏感度,降低设定给予的影响与感测器的飘移。 数字运动处理(DMP: Digital Motion Processing)引擎可减少复杂的融合演算数据、感测器同步化、姿势感应等的负荷。 运动处理数据库支持android、Linux与Windows 内建之运作时间偏差与磁力感测器校正演算技术,免除了客户须另外进行校正的需求。 以数位输出的温度传感器 以数位输入的同步引脚(Sync pin)支援视频电子影相稳定技术与GPS 可程式控制的中断(interrupt)支援姿势识别、摇摄、画面放大缩小、滚动、快速下降中断、high-G中断、零动作感应、触击感应、摇动感应功能。 VDD供电电压为2.5V±5%、3.0V±5%、3.3V±5%;VDDIO为1.8V± 5% 陀螺仪运作电流:5mA,陀螺仪待命电流:5µA;加速器运作电流:350µA,加速器省电模式电流: 20µA@10Hz 高达400kHz快速模式的I2C,或最高至20MHz的SPI串行主机接口(serial host interface) 内建频率产生器在所有温度范围(full temperature range)仅有±1%频率变化。 使用者亲自测试 10,000 g 碰撞容忍度 为可携式产品量身订作的最小最薄包装 (4x4x0.9mm QFN) 符合RoHS及环境标准
以上是关于机器人微控制器编程(CoCube)-深度融合的主要内容,如果未能解决你的问题,请参考以下文章