蓝桥ROS机器人之turtlesim导航
Posted zhangrelay
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了蓝桥ROS机器人之turtlesim导航相关的知识,希望对你有一定的参考价值。
需要预备如下基础:
使用功能包为:
后续会补充stdr案例(ROS小课堂出品)。
~ www.corvin.cn/561.html ~
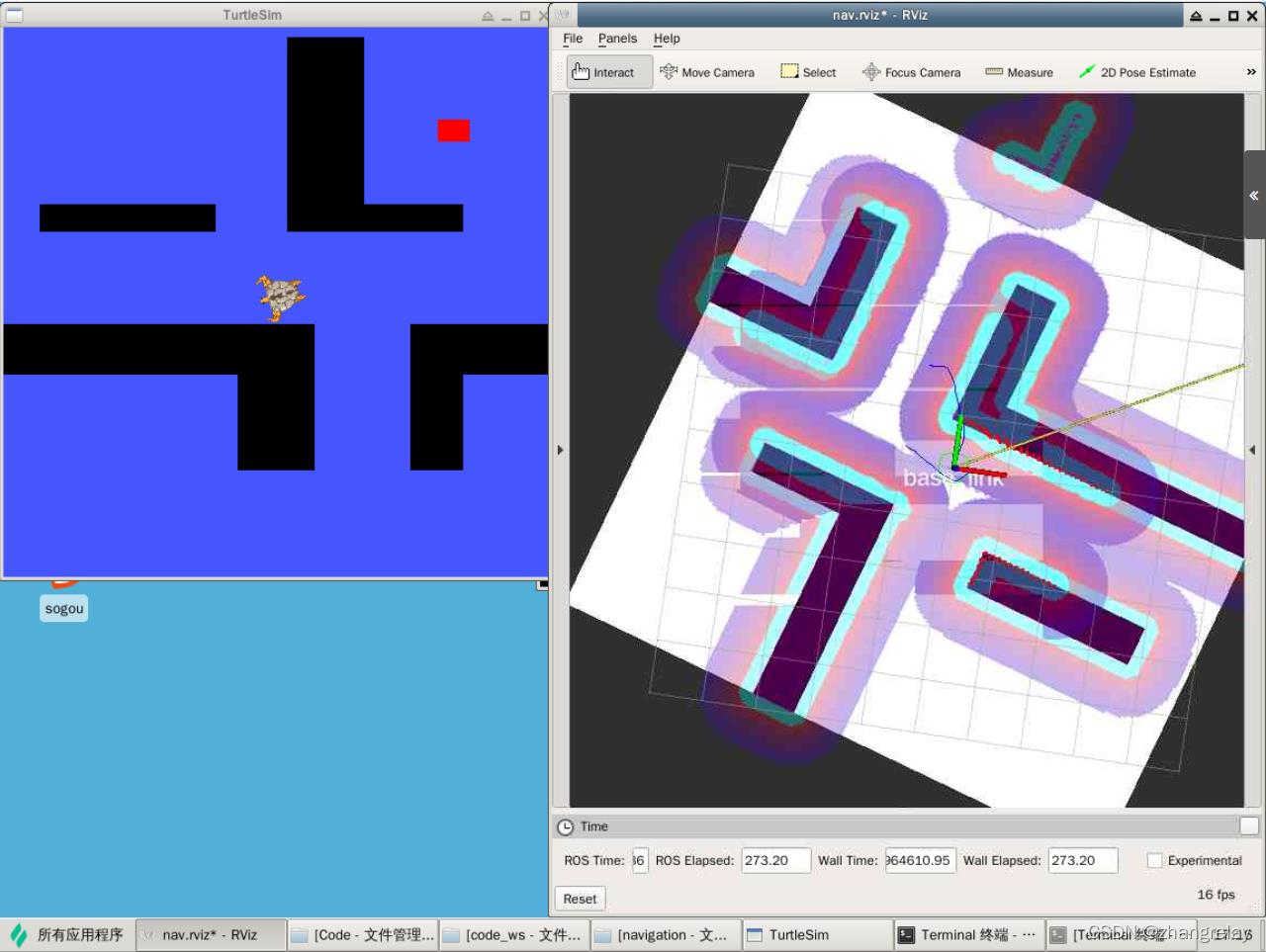
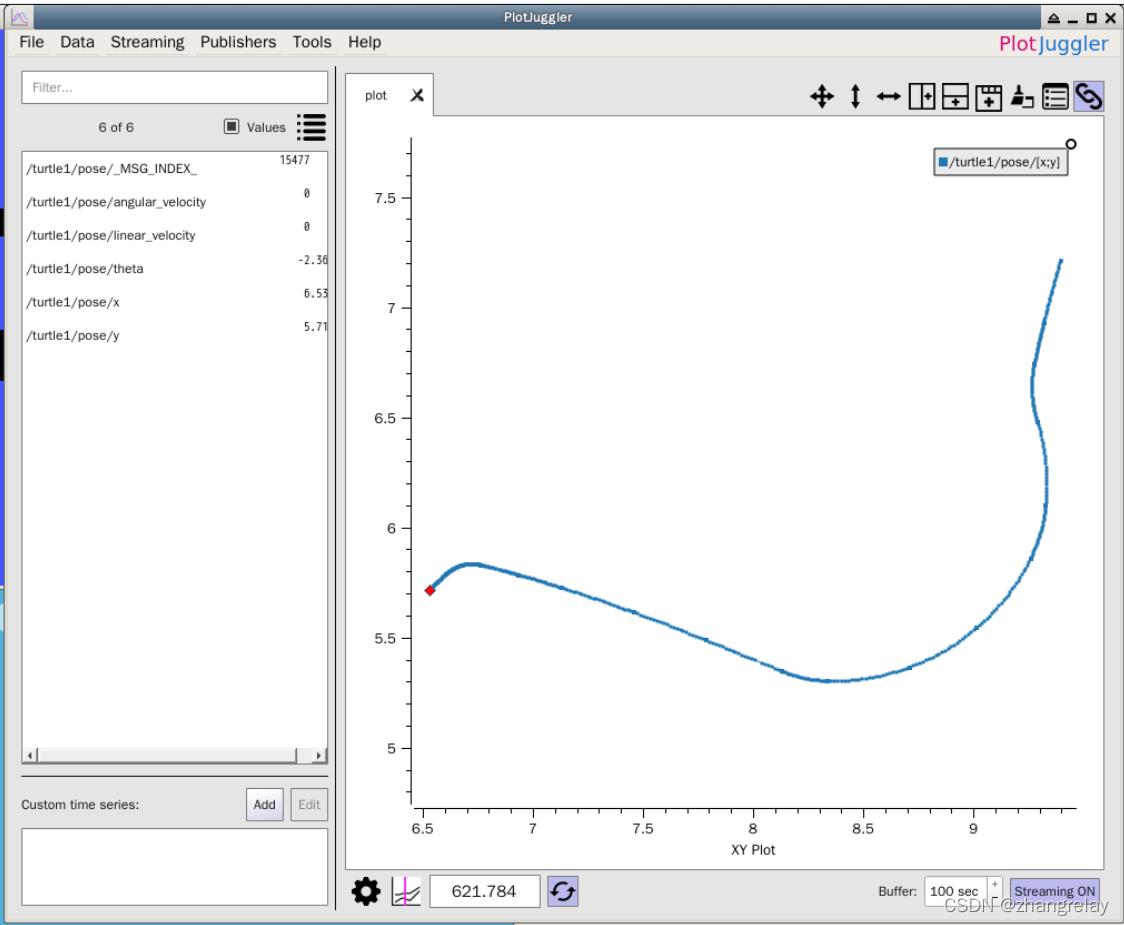
使用plotjuggler
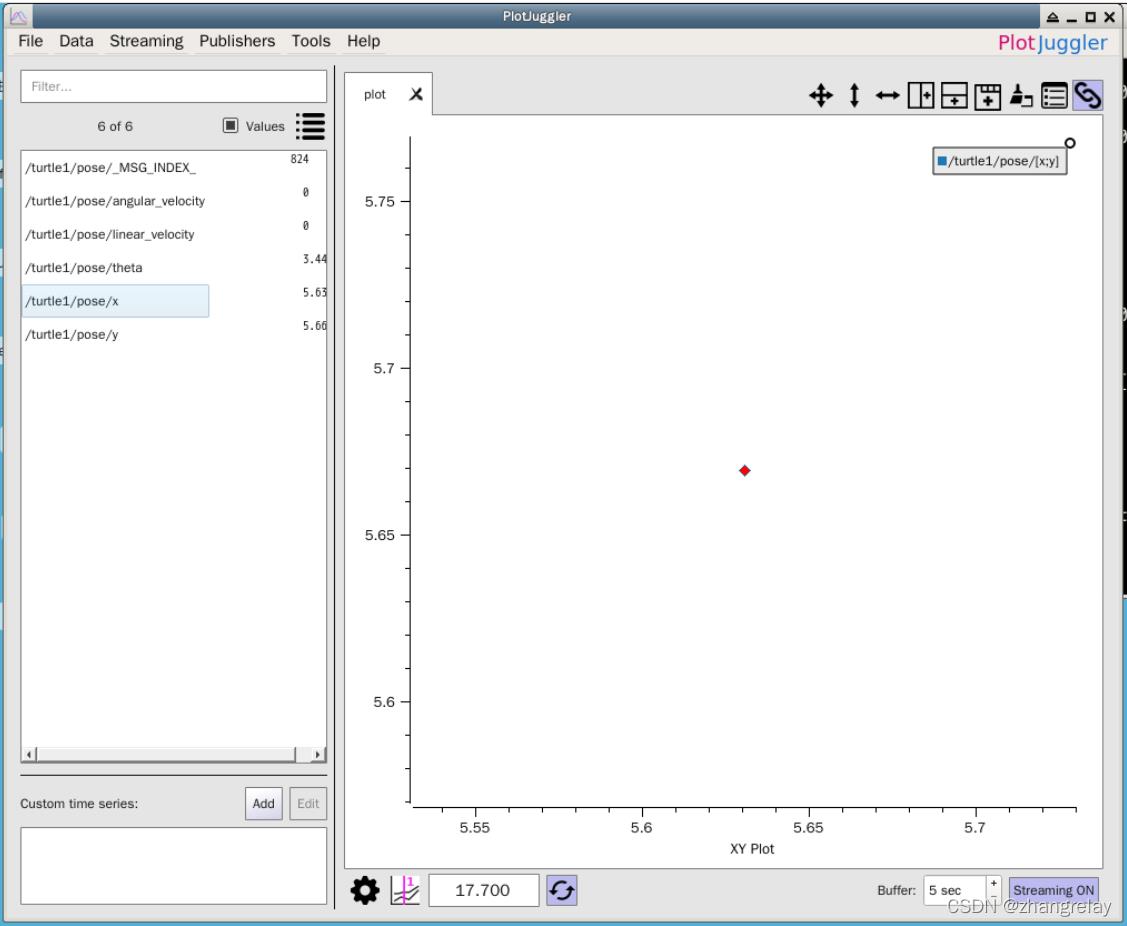
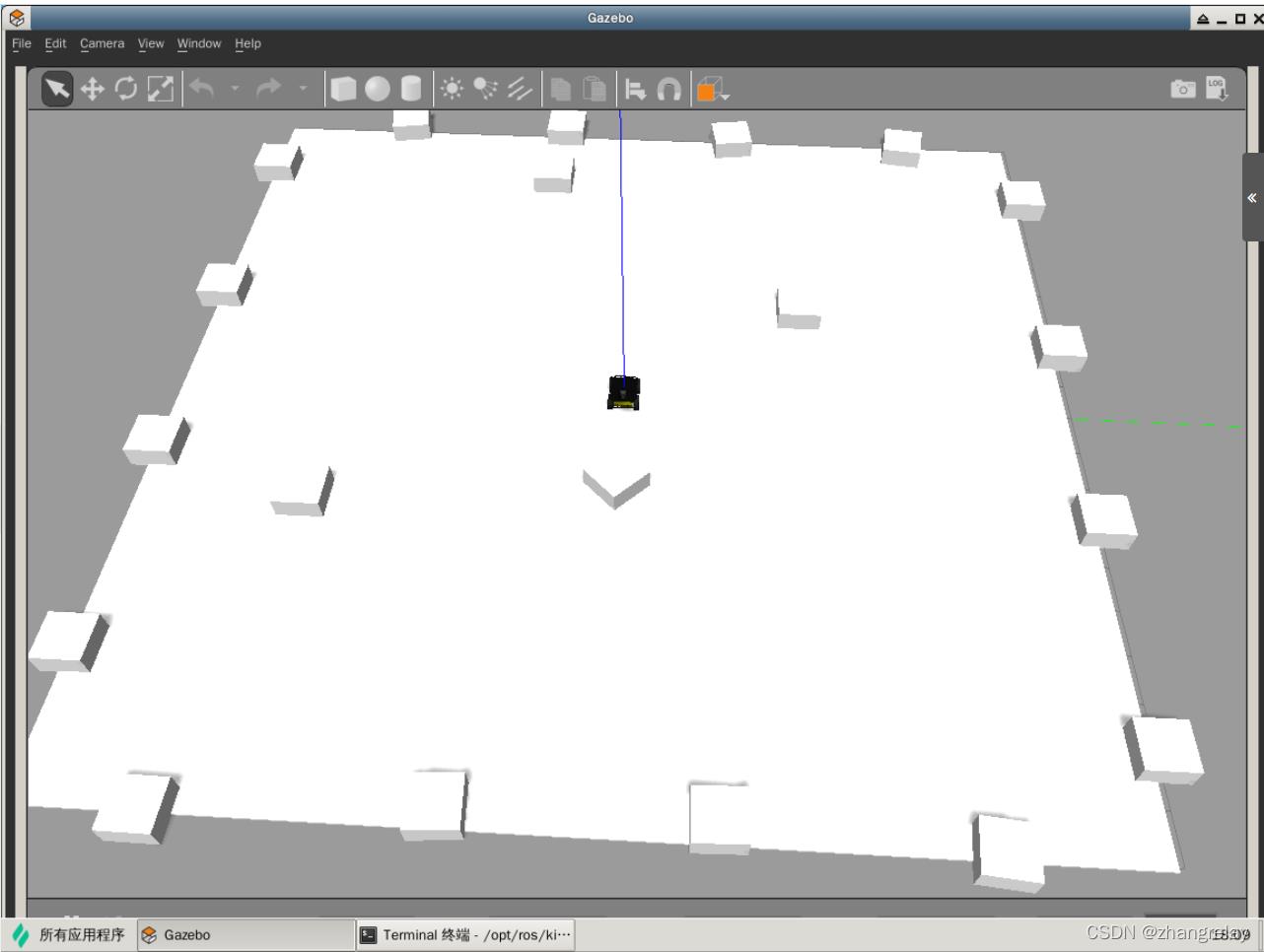
专业出图工具,路径一目了然。

移动到红色位置!
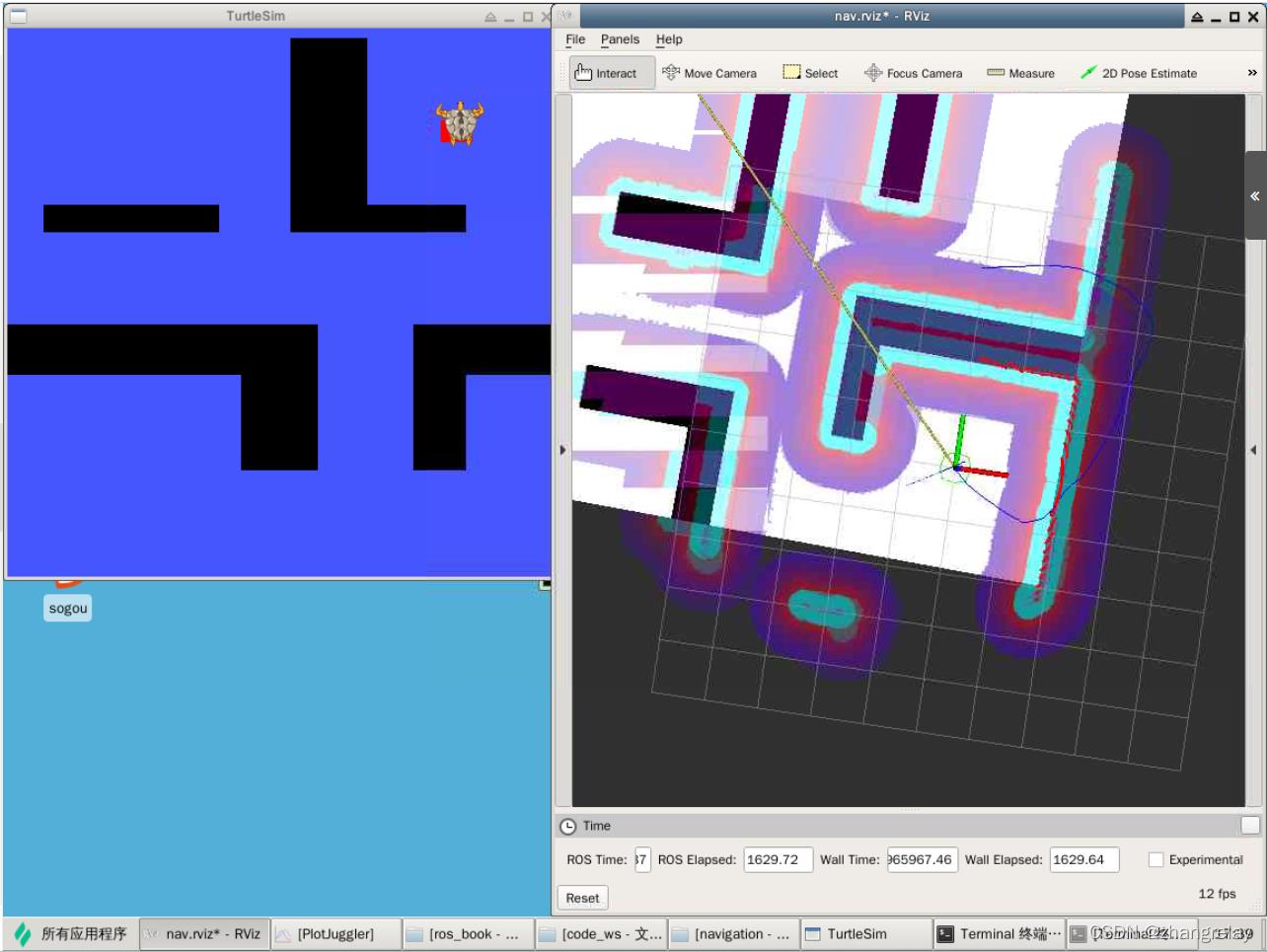
再回到中心:
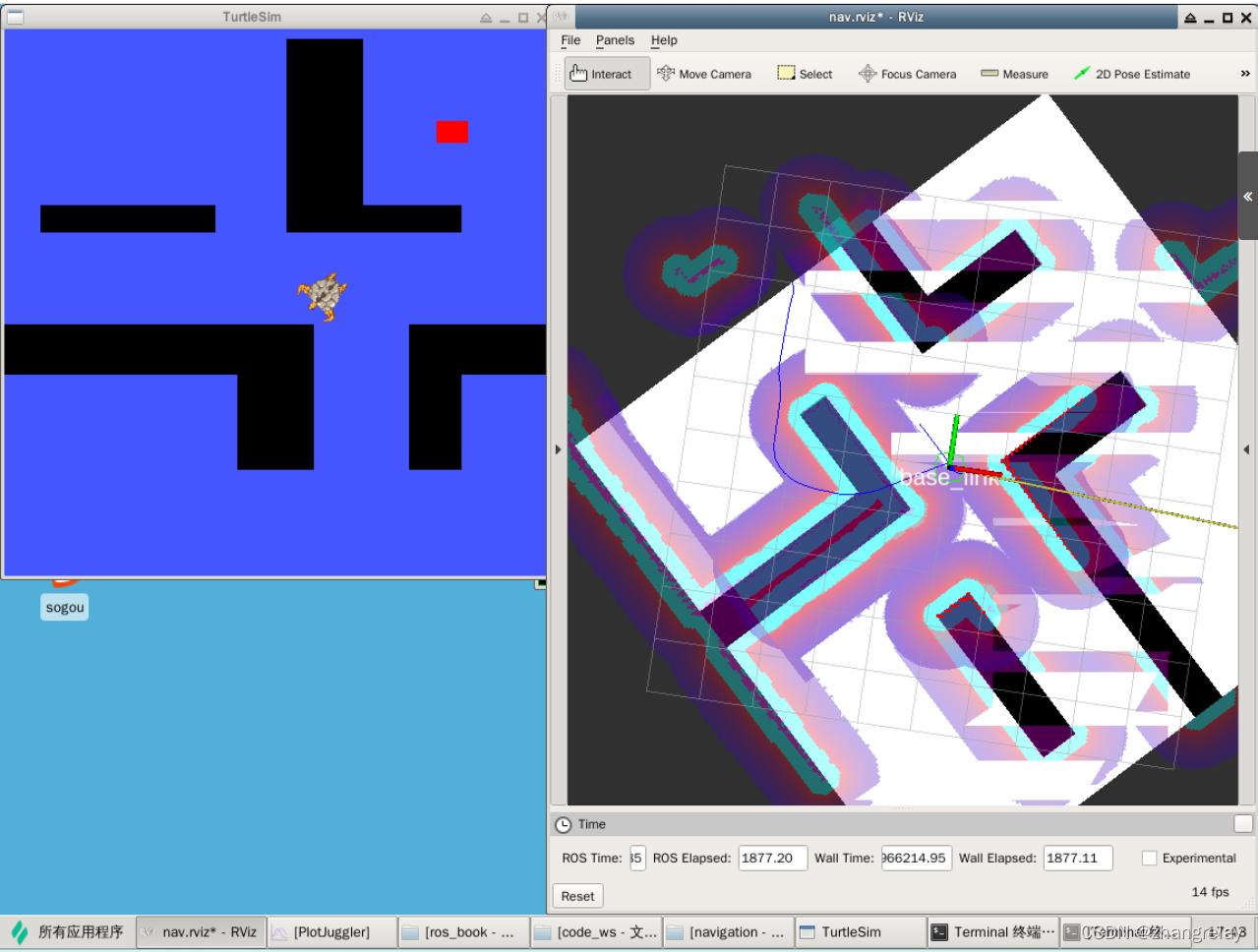
曲线图如下:
部分命令如下:
shiyanlou:~/ $ history [17:45:05]
1 unzip turtlesim_examples.zip
2 cd code_ws
3 catkin_make
4 source devel/setup.bash
5 source devel/setup.zsh
6 roslaunch turtlesim_examples draw.launch
7 roslaunch turtlesim_examples bumber.launch
8 rostopic list
9 rostopic echo /bumber
10 roslaunch turtlesim_examples laser.launch
11 source devel/setup.zsh
12 roslaunch turtlesim_examples moveBase.launch
13 git clone https://gitcode.net/ZhangRelay/ros_book.git
14 ls
15 cd ros_book
16 ls
17 unzip navigation-kinetic-devel.zip
18 catkin_make
19 sudo apt-key add ros.asc
20 sudo apt update
21 sudo apt install ros-kinetic-move-base
22 source devel/setup.zsh
23 roslaunch turtlesim_examples laser.launch
24 sudo apt install ros-kinetic-map-server
25 catkin_make
26 roslaunch turtlesim_examples laser.launch
27 source devel/setup.zsh
28 roslaunch turtlesim_examples moveBase.launch
29 sudo apt install ros-kinetic-plotjuggler
30 rosrun plotjuggler PlotJuggler
shiyanlou:~/ $ [17:45:10]
更多案例后续补充:
 创作打卡挑战赛
创作打卡挑战赛
 赢取流量/现金/CSDN周边激励大奖
赢取流量/现金/CSDN周边激励大奖
以上是关于蓝桥ROS机器人之turtlesim导航的主要内容,如果未能解决你的问题,请参考以下文章
蓝桥ROS机器人之turtlesim贪吃蛇移植到Win11中