这个陀螺仪的精度太高了,还是建议禁止使用吧。
Posted 卓晴
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了这个陀螺仪的精度太高了,还是建议禁止使用吧。相关的知识,希望对你有一定的参考价值。

简 介: 卓大,我想提点建议,我看昨天的推文评论区有人问(室外竞速组)陀螺仪是否可以使用陀螺仪“。
关键词: 智能车竞赛,提问,回答
§01 陀螺仪
卓大,我想提点建议,我看昨天的推文评论区有人问(室外竞速组)陀螺仪是否可以使用陀螺仪“。

▲ 图1.1 越野组别中的IMU和GPS
卓大,我想提点建议,我看评论区有人问陀螺仪“HWT101”,可能卓大也没用过这个,不大了解,以下是我都简要分析。我希望卓大可以慎重考虑下“不允许”
原因:这款陀螺仪我有了解,内带姿态解算,直接输出角度,这不是什么大问题,真正的问题是精度于价格,这个陀螺仪价格也还可以接受(400多),最大的问题的精度特别高,我这里实际测试可以达到5-6分钟偏差为0.1°左右。

▲ 图1.2 HWT101演示界面
我认为直接使用这种超高精度的陀螺仪不利于比赛宗旨:鼓励探索。对普通陀螺仪的积分误差通过自己研究算法来消除修正更能锻炼人。希望卓大能慎重考虑下。
这款陀螺仪是单轴陀螺仪,只有z轴一个轴,通过商家在内部MCU编写的解算代码能达到非常高的精度,一般用于agv物流小车,卓大可以了解一下。
§02 K车模
卓老师您好,科宇的这款单车比赛能用吗? 卓老师您好按照公众号里的那种动量轮安装方式,60mm飞轮依旧卡坡怎么办?

▲ 图1.3 K车模上的惯性轮
回复: 这个车模是允许使用的。 你在安装飞轮过程中出现卡在坡道过渡过程,还需要通过调整它的机械位置进行改进。 另外坡道的过渡过程需要进行光滑过渡,这样也可以减少车模剐蹭赛道的问题。
§03 T型路口
卓大,这样跑十字回环可以吗?

▲ 图2.2 赛道中的 T型路口
回复:关于十字路口,T型路口的通过方式,还是需要遵循:如果前行条件允许,则需要前行通过。 如果T型路口,前行不允许,则需要直接左转,或者右转行进。
§04 U400舵机
现在博思公司推出S-U400舵机,作为S3010的替代品。它可以应用在现在竞赛中原来S3010所使用的范围内。
现车模伺服器FutabaS3010为FutabaS-U400型号伺服器,安装尺寸一致;
产品升级:主要是性能升级,响应速度提升,使用的电源电压提升;
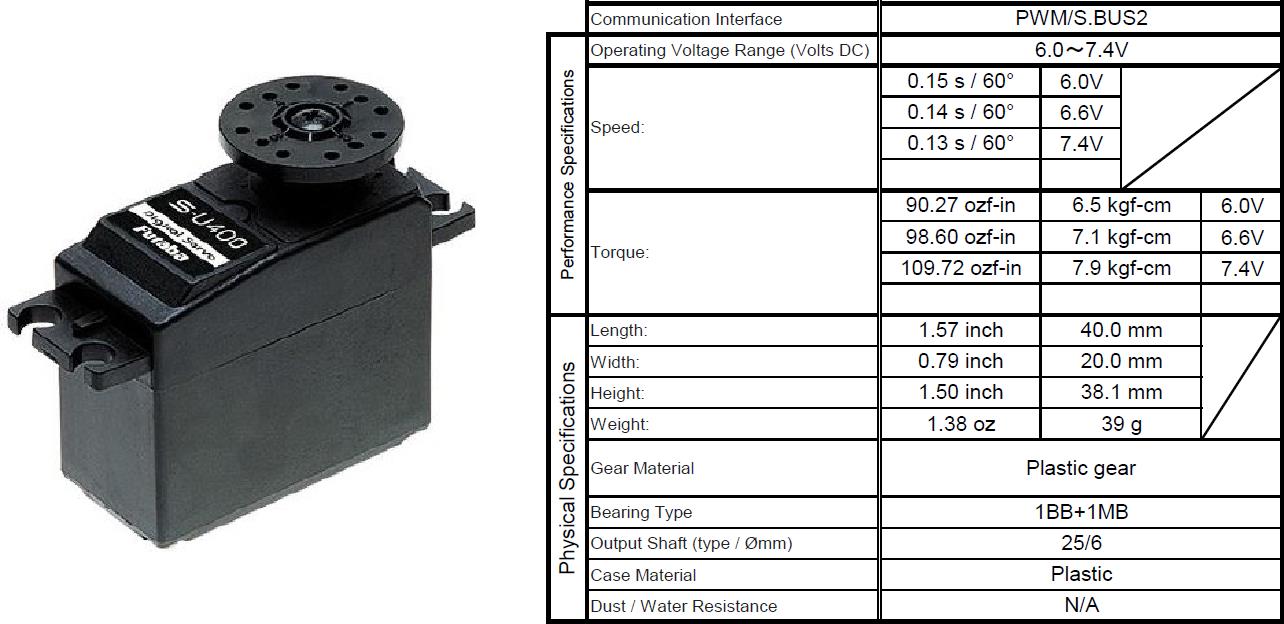
▲ 图1.1 S-U400舵机
S3010与S-U400伺服器参数对比:
| 序号 | 参数名称 | S3010 | S-U400 | 备注 |
|---|---|---|---|---|
| 1 | 品牌 | Futaba | Futaba | 同一品牌 |
| 2 | 产品尺寸(mm) | 402038.1 | 402038.1 | 安装一致 |
| 3 | 重量(g) | 41 | 39 | S-U400重量小一些 |
| 4 | 电源电压(V DC) | 4.0 ~ 6.0 | 6.0 ~ 7.4 | S-U400驱动电压提升 |
| 5 | 扭力(kgf.cm) | ≤6.5 | ≥6.5 | S-U400最小扭力等同于S3010最大扭力 |
| 6 | 响应速度(S 60°) | 0.25 - 0.16 | 0.15 - 0.13 | S-U400 响应速度更灵敏 |
| 7 | 驱动方式 | 高电平脉宽驱动 | 高电平脉宽驱动 | 驱动方式一致 |
| 8 | 驱动脉宽范围 | 900uS - 2100uS | 900uS - 2100uS | 驱动脉宽范围一致 |
● 相关图表链接:
以上是关于这个陀螺仪的精度太高了,还是建议禁止使用吧。的主要内容,如果未能解决你的问题,请参考以下文章