KITTI 数据集
Posted superxiaoying
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了KITTI 数据集相关的知识,希望对你有一定的参考价值。
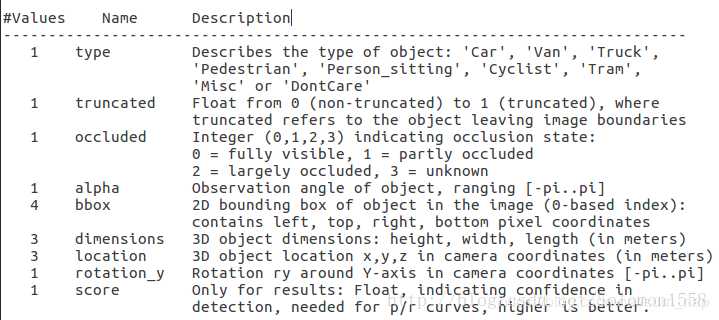
字段一:type
物体类别:‘Car’, ‘Van’, ‘Truck’,‘Pedestrian’, ‘Person_sitting’, ‘Cyclist’,‘Tram’, ‘Misc’ or ‘DontCare’
注意,’DontCare’ 标签表示该区域没有被标注,比如由于目标物体距离激光雷达太远。为了防止在评估过程中(主要是计算precision),将本来是目标物体但是因为某些原因而没有标注的区域统计为假阳性(false positives),评估脚本会自动忽略’DontCare’ 区域的预测结果。
字段2:truncated
代表物体是否在图像内,取值为0~1之间的浮点数
字段3:occuluded
代表物体是否被遮挡
取值为整数0,1,2,3表示被遮挡的程度
0:完全可见 1:小部分遮挡 2:大部分遮挡 3:完全遮挡(unknown)
字段4:alpha
物体的观测角度(全局角度):
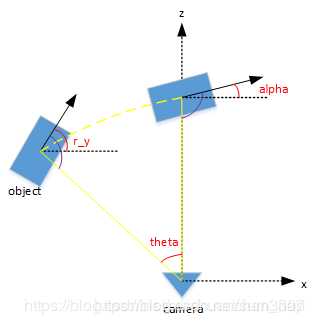
alpha,物体的观察角度,范围:[-π,π]
是在相机坐标系下,以相机原点为中心,相机原点到物体中心的连线为半径,将物体绕相机y轴旋转至相机z轴,此时物体方向与相机x轴的夹角
r_y + pi/2 -theta = alpha +pi/2(即图中紫色的角是相等的)
所以alpha = r_y - theta
字段5~8:2D标注框
物体的2维边界框:xmin,ymin,xmax,ymax;分别为该边界框在2D图像上的左、上、右、下,四个地方的边界线。该四条边界线组成的框。
字段9~11:3维物体的尺寸:在空间中的长宽高
字段12~15:在相机坐标系下的3D物体位置(划重点,此处用的是相机坐标系,不是lidar坐标系!!!!)
字段16:3维物体的空间方向:rotation_y;
这个y方向指的是激光点云的坐标系。范围[-π,π];
以上是关于KITTI 数据集的主要内容,如果未能解决你的问题,请参考以下文章