为啥采用模糊控制器的simulink仿真运行时间中途停止?
Posted
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了为啥采用模糊控制器的simulink仿真运行时间中途停止?相关的知识,希望对你有一定的参考价值。
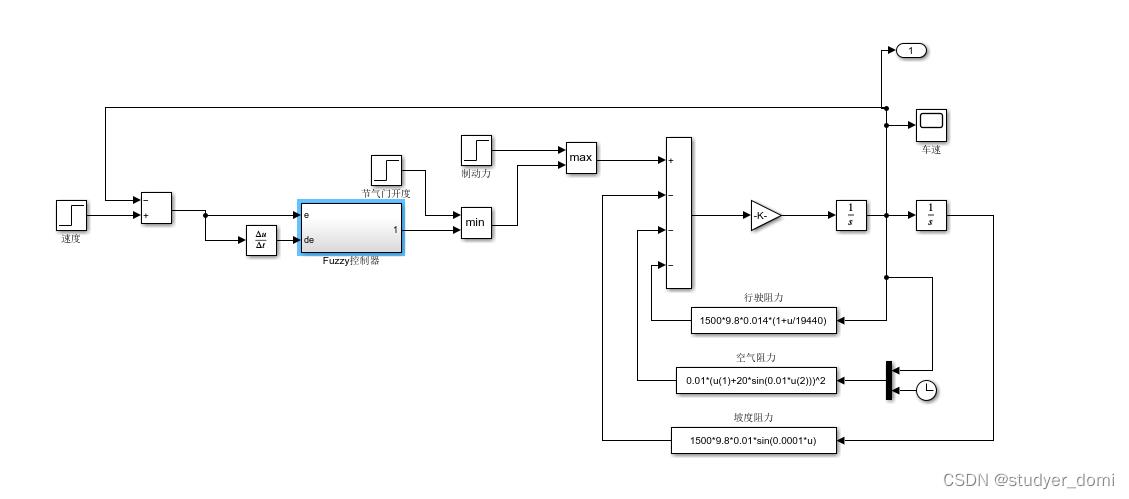
如题所示,仿真图如下,无论如何调节增益,修改控制器规则等,很多时候运行时间中途停止,不能完成运行。

2,改变SOLVER
3, 用m语言来实现你的FUZZY CONTROLLER,别用MATLAB提供的GUI了,用了GUI你也不会知道模糊控制器任何的工作机理。 参考技术A 量化因子或者比例因子可能太大了。也有可能是阶跃信号的幅值不对,你改改看看。
matlab simulink汽车巡航时的速度模糊pid控制
1、内容简介
略
432-可以交流、咨询、答疑
2、内容说明
我们将汽车动力仿真模型和模糊PID控制器仿真模型以及PID控制器仿真模型制作成子系统,做最后的仿真连接,
我们分别设定巡航车速为40km/h、80km/h和100km/h,对整个仿真系统做必要的设置后点击运行按钮,得出仿真结果曲线。 通过三组仿真曲线我们看到,模糊PID控制的曲线效果非常好,当巡航车速设定为40m/h、80km/h和100km/h时,模糊PID控制曲线的响应时间逐渐加快,且超调量逐渐减少,直至几乎没有超调,稳定性好。模糊PID控制具有良好的稳定性,超调量小。通过对不同巡航车速的仿真结果分析,得出了相类似的结论。模糊PID控制减小了超调,适当加快了响应时间,具有较好的稳定性。此次设计基本达到了利用模糊PID控制的目的。
3、仿真分析

4、参考论文
略
以上是关于为啥采用模糊控制器的simulink仿真运行时间中途停止?的主要内容,如果未能解决你的问题,请参考以下文章
matlab simulink汽车巡航时的速度模糊pid控制